Helicopter Blade Twist Optimization in Forward Flight
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Helicopter Blade Twist Optimization in Forward Flight
Marco Lonoce
Thesis to obtain the Master of Science Degree in
Aerospace Engineering
Supervisor(s): Prof. Filipe Szolnoky Ramos Pinto Cunha
Examination Committee
Chairperson: Prof. Fernando José Parracho Lau
Supervisor: Prof. Filipe Szolnoky Ramos Pinto Cunha
Member of the Committee: Prof. João Manuel Gonçalves de Sousa Oliveira
November 2016ii
To my father... iii
iv
Acknowledgments
I want to start by thanking Professor Filipe Cunha for the theme of thesis and for his help during the
work. Every meeting was really important to understand the correct direction to the end of this thesis.
My university in Italy, Politecnico di Torino, that gives me the opportunity of a Double Degree Project
with the Instituto Superior Tecnico in Lisbon, Portugal. It was fundamental the heavy work between the
coordinator of the two universities to create this new project.
The important help that the government of Italy and Piedmont region gave me as scholarship and student
residence every year.
My family and specially my father that couldn’t see the end of my studies. They believed me in every
choice that I took.
Finally, all of people that were not mentioned but gave a contribution to this thesis.
vvi
Resumo
O incremento da eficiência do helicóptero é um aspecto fundamental a ter em consideração no
desenvolvimento inicial do helicóptero. Este ponto pode ser conseguido de várias maneiras. Em relação
à potência consumida há certos aspectos ligados à aerodinâmica do rotor que precisam de ser tomados
em conta, em especial a potência induzida aquela que é necessária fornecer ao rotor para este gerar
a propulsão. É possı́vel minimizar esta potência uniformizando a velocidade induzida ao longo da pá
para todas as posições azimutais. Nesta tese é explorada a ideia de modificar a torção na pá para cada
condição de voo de maneira a minimizar a potência induzida. São considerados as seguintes hipóteses:
uma secção com torção linear, uma secção com torção quadrática, duas secções com torções lineares,
e três secções com torções lineares. Por outro lado esta tese tem também como objectivo determinar
quais os conceitos apresentam uma boa oportunidade para a aplicação de uma controlo activo da
torção da pá. As simulações foram realizadas tendo como base o Sikorsky UH-60A Black Hawk, para o
qual todos os parâmetros do rotor estão disponı́veis.
Palavras-chave: Controlo activo da torção, redução da potência induzida, estruturas adap-
tativas, optimização do rotor principal, actuadores piezoelétricos, materiais compósitos em fibras.
viiviii
Abstract
Improving the efficiency of the helicopter is one of the main objective in helicopter design. Several
ways are already taken in account to achieve this purpose. In relation to the power consumption there are
some aspects connected with the aerodynamic of the main rotor, specially the induced power, the power
used to generate the thrust needed to fly. It’s possible to minimize this power trying to uniform the inflow
along the blade for all the azimutal positions. In this thesis the idea is to modify the blade twist in each
flight conditions to obtain the minimum induced power. The twist distribution concepts considered are
one segment linear twist, quadratic twist, two linear twist segments with different divisions of the blade in
inner and outer parts and a three linear twist segments with different airfoils. This thesis has the purpose
to understand which concepts represent good opportunity for active twist control implementations. With
the results of the simulations a simple active twist control concept is developed. An objective is to
understand which piezoelectric actuators work better for this purpose, where they have to be placed and
how they have to be actuated. All the simulations are done on the Sikorsky UH-60A Black Hawk where
all the main rotor parameters are available.
Keywords: Active Twist Control, Induced power reduction, morphing, main rotor optimization,
piezoelectric actuators, macro fibers composite materials.
ixx
Contents
Acknowledgments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv
Nomenclature xvii
Nomenclature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xviii
1 Introduction 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Active Blade Twist Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.4 Thesis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Background 5
2.1 Momentum Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Blade Element Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 Xfoil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4 Blade Element Momentum Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.5 Inflow Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.6 Flapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.7 Fmincon and Global Search . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3 Implementation 17
3.1 Numerical Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Verification and Validation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.3 Effect of Blade twist on Main Rotor Power . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4 Results 31
4.1 Optimized Blade Twist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.1.1 One section with linear twist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.1.2 Quadratic Twist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
xi4.1.3 Two sections with linear twist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.1.4 Two sections with linear twist and different airfoils . . . . . . . . . . . . . . . . . . . 36
4.1.5 Three linear segments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.2 Optimum Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5 Concept 41
5.1 Smart Blades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.2 Constraints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.3 Piezoelectric Actuation Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.4 Application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6 Conclusions 51
6.1 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Bibliography 52
A Appendix: Matlab Code 59
A.1 Main Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
A.2 Constraints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
A.3 Optimization function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
A.4 Flapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
xiiList of Tables
3.1 UH-60A Tail Rotor Characteristics [19] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2 UH-60A Data [19] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.1 Reduction of power between Fixed linear twist and simulations . . . . . . . . . . . . . . . 39
5.1 Actuators Properties [6] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.2 Actuators and Concepts Comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
xiiixiv
List of Figures
2.1 Flow Model Momentum Theory Hovering . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Blade Element Theory Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 Forces around NACA 23015 - Xfoil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.4 CP distribution NACA 23015 - Xfoil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.5 Local Momentum Analysis BEM Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.6 Velocity distribution Hovering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.7 Inflow and Thrust Hovering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.8 Velocity distribution Forward Flight . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.9 Flapping Hinge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1 Sikosrky SC 1095 Airfoil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Sikosrky SC 1094 R8 Airfoil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3 Error Analysis lift curve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.4 Error Analysis drag curve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.5 Interpolation lift curve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.6 Interpolation drag curve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.7 Blade Elements for Hovering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.8 Blade Elements for Forward Flight . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.9 Number of Azimuthal Position . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.10 Flight Test Data Comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.11 Power consumption with different twists - Hovering . . . . . . . . . . . . . . . . . . . . . . 27
3.12 Power consumption with different twists - Low Speed Forward Flight . . . . . . . . . . . . 28
3.13 Power consumption with different twists - Medium Speed Forward Flight . . . . . . . . . . 28
3.14 Power consumption with different twists - High Speed Forward Flight . . . . . . . . . . . . 29
3.15 Comparison among different twist behaviours . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1 Linear Twist - Only one section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.2 Parameter a - Quadratic twist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.3 Root Tip difference - Quadratic twist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.4 Two sections with linear twist 40 - 60 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.5 Two sections with linear twist 50 - 50 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
xv4.6 Two sections with linear twist 60 - 40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.7 Two sections with linear twist 70 - 30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.8 Two sections, two airfoils and linear twist 50 - 50 . . . . . . . . . . . . . . . . . . . . . . . 36
4.9 Blade planform UH-60A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.10 Three sections with linear twist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.11 Sikorsky UH-60A Twist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.12 Comparison Flight Test Data and Three linear segments . . . . . . . . . . . . . . . . . . . 39
4.13 Twist Behaviours Comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.1 Active Twist Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.2 Piezoelectric Deformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.3 Continuous Electrode vs Interdigitaded Electrode . . . . . . . . . . . . . . . . . . . . . . . 44
5.4 Continuous Electrode vs Interdigitaded Electrode Electric Field . . . . . . . . . . . . . . . 45
5.5 Free Strain Comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.6 Micro Fiber Composite Actuator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.7 Electric Field Comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.8 Blade Model with black box . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.9 Airfoil with Actuators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.10 Torsion Angle of the Thermal Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
xviNomenclature
Roman Symbols
A Disk Area
Aed Equivalent Wetted Area
Ainf Infinity Volume Control Area
B Coefficient for effective Blade Radius
c Chord
Cl Coefficient of Lift
Clα Slope of coefficient of lift - alpha curve
Cd Coefficient of Drag
Cdp Coefficient of Pressure Drag
Cm Coefficient of Moment
CT Coefficient of Thrust
CP Coefficient of Power
D Drag
e Eccentricity of the flapping hinge
f Tip or Hub loss parameter
F Correction Factor for tip or hub loss
fdrag Drag Parameter
kx Cosinus component for linear inflow model
ky Sinus component for linear inflow model
Ib Mass moment of Inertia
L Lift
ṁ Mass Flow
P Power
r Adimensional radius
S Control Surface Area
T Thrust
UP Component of velocity perpendicular to the rotor
UT Component of the velocity parallel to the rotor
V Forward Speed
xviivi Induced Velocity
Vtip Blade Tip Velocity
y Coordinate along the blade
w Wake velocity
Greek Symbols
α Angle of Attack
αij Thermal Coefficient
β Flapping Angle
β0 Coning Angle
β1c Cosinus first harmonic flapping Angle
β1s Sinus first harmonic flapping Angle
γ Shear Strain
∆ES Spacing between Electrodes
χ Skew Angle
λ Inflow velocity
σ Solidity
µ Advanced Ratio
φ Inflow Angle
ρ Density
ψ Azimuth
θ Blade Twist
Ω Rotor Shaft Speed
Abbreviations and Acronyms
AFC - Active Fiber Composite
BEMT = Blade Element Momentum Theory
BET = Blade Element Theory
CFD = Computational Fluid Dynamics
MFC = Macro Fiber Composite
PZT = Zirconate Titanate Piezoceramic
UAV - Unmanned Aerial Vehicles
xviiiChapter 1
Introduction
1.1 Motivation
A helicopter is a low speed, short range and low altitude aircraft. One of the main objectives in
helicopter design is improving the efficiency that is related with endurance, range, maximum forward
speed and also ceiling.
The helicopter power consumption is essentially divided in four parts: main rotor induced power, main
rotor profile power, fuselage parasitic power and tail rotor power [1]. All of these aspects are strongly
connected with the aerodynamic of the helicopter that, unfortunately, depends of the flight condition.
Recent studies [2, 3, 4] are focused on main rotor performance enhancement, because of its strong
influence on over-all helicopter performace (for example: hover and forward flight performance, noise
emission and vibration transmission at the hub). Unfortunately, the flight envelope of a helicopter is too
broad and for this reason, it’s impossible to meet all the constraints and requirements to have always
an optimum condition. The old design philosophy privileges just some flight conditions, in general the
hovering [5].
At this moment, the possibility to adaptively modify the design parameters to achieve an optimal con-
figuration for each flight condition is understudied. To reduce vibration, noise or minimize the induced
power for every forward speeds it’s possible to modify the shape, or the other parameters, of the blade.
These systems are called smart helicopter blades [6] that integrate an active mechanisms able to modify
the blade characteristics in function of the flight condition:
• Flaps: in helicopter blades, flaps are not a primary control surface but are used only to local
modified the lift to reduce vibration and noise [6, 3, 7, 8].
• Morphing blades: this idea shows how important is the biomimetic from the engineering point of
view. Birds modify their wings to adapt in each flight condition, in the same way a morphing blade
is able to change the shape to obtain improvements in aerodynamic loads, vibration and noise.
The possibilities are a modification of the leading or trailing edge, the airfoil camber or an active
twist control [6, 9, 10, 11, 12].
1• Active Flow Control: the main object is to improve the lift on a profile. Every points after the sepa-
ration point don’t produce lift, so the idea is to bring the separation point as closer as possible to
the trailing edge to reduce the area without lift generation. The solutions found are a re-energising
or suction of the boundary layer on the top part of the airfoil [6, 13].
All of these systems need a correct integration with the blade and bring several challenges or prob-
lems that have to be fixed [14]. The helicopter blades are designed to work under large centrifugal loads
and, for this reason, a higher part of the section is filled with structural material. The space where it’s
possible to install an actuator is very limited. Another aspect is the weight that, if increased, amplifies
the centrifugal loads to the hub. Also the active system is influenced by the centrifugal loads and has
to be designed thinking that it has to be able to work under these loads. Of course, after all the design
aspects, if the complexity increases the possibility of failure also is higher. But on the other hand, these
systems could reduce the power consumption, vibration (really important for comfort on board for pilot
and passengers and fatigue loads on the helicopter) and noise.
1.2 Active Blade Twist Control
When a blades rotates, each point travels at different speed that is a function of the radial position
and, in forward flight also, azimuth position. This means that the contribution of lift and drag of each
point is also different, going higher at the tip. The consequence is that the lift distribution along the
blade is not constant. With a energy balance it’s easily understandable that the condition with uniform
lift distribution has the minimum induced power consumption [1, 15]. The blade twist is now introduced,
to achieve this purpose. Unfortunately, each flight condition has a different blade twist distribution that
minimizes the induced power. Increasing blade twist in hover and decreasing it in high speed forward
fight is well recognized in helicopter rotor design [1, 15]. According to Leishman [1], the inflow equation
in hovering condition has a special solution that gives uniform inflow:
θtip
θ(r) = (1.1)
r
where θ represents the twist.
Equation 1.1 shows a hyperbolic behaviour of the twist. Unfortunately, this solution is physically
unrealisable for r → 0. In pratical sense it’s possible to approximate this solution with a linear twist
distribution because of the hub and root cut-out. According to recent studies, for example a rotor blade
optimization at Eurocopter [16], the twist distribution is related to the mission profile of the helicopter
considered. They optimized the rotor twist in each flight condition between hover and high speed forward
flight. After that, in function of the mission profile it’s chosen an intermediate condition that is a weighted
average between time in hover and forward flight. Other recent studies [17, 18] try to build a main rotor
that it is optimized for each flight condition. To achieve this purpose it’s necessary to use an active twist
control able to generate a torque moment to re-distribute the twist along the blade.
2In the beginning the active twist control was utilized to reduce rotor vibrations [19], in fact in 1990s Chen
and Chopra did some tests in hover and forward flight in a wind tunnel [20, 21]. They used a smart rotor
model with individual blade control and embedded piezoceramic actuators. They wanted to achieve
a target value around 2◦ but they got a maximum twist amplitude of 0.5◦ . This result was enough
to demonstrate that the concept was feasible and that there were advantages in term of vibrations
and noise [20, 21]. Other studies were conducted for example, the active rotor of NASA / Army / MIT
demonstrated that on fixed frame the active system was able to reduce vibratory loads [9]. Thakkar and
Ganguli [11] studied how to reduce vibration, delay flow separation and alleviate dynamic stall. The most
recent studies done by Sikorsky Aircraft and Cheng and Celi [4, 22] demonstrated less power needed
of 1-2% in wind tunnel tests. Another study done by Chopra [23] coupled computational fluid dynamics
and computational structural dynamics analysis on a Sikorsky UH-60A Black Hawk helicopter rotor with
an active twist control. The lift to drag ratio increased by 7.3% and the corresponding power decreased
by 3.3%, the system required a target of 4◦ twist control to achieve this result. Due to the constraints of
weight, space and mechanical actuations a possible solution for an active twist control is a piezoelectric
actuation system. In general, piezoelectric materials have the property to convert mechanical energy in
electrical energy and vice-versa [6]. A piezoelectric material is polarized and when an electric field is
applied in the direction of polarization it extends in that direction and contracts in the other two (in general
symmetrically), if is applied in the opposite direction it extends in the two other directions and contracts
in the main one [24]. But, if is applied an electric field perpendicular to the direction of polarization the
effect is a shear deformation mode. Research has been conducted on manufacturing a twisting actuator
that utilises actuators assembled in circle that can directly provide rotation and torque [25, 26].
1.3 Objectives
This thesis is focused on the application of variable blade twist to obtain reductions in power con-
sumption. Different twist distributions are considered and how they have to change to minimize the
induced power in each flight condition is studied. The purpose is to understand what happen in the
different conditions and if some of them present advantages related to the others.
1.4 Thesis Outline
This thesis is divided in 6 chapters:
• Chapter 2 : It’s the theoretical background behind the thesis. The software Xfoil used to obtain the
airfoils information, the models for the aerodynamic characteristics, the inflow and the algorithms
for the optimization.
• Chapter 3: Shows how the theoretical background is used to implement the model. The code is
tested doing a comparison with the flight data of the Sikorsky UH-60A Black Hawk and it’s used,
also, to show the effect of the blade twist on the total power consumption of the helicopter.
3• Chapter 4: Presents the results of the simulations and a comparison among the solutions.
• Chapter 5: Preliminary design of an active twist control.
4Chapter 2
Background
To study the aerodynamics of the rotor CFD analysis based on free wake methods are commonly
used [27, 28]. They calculate the vortical wake structure to predict the rotor performance. These meth-
ods have a high computational cost, for this reason it’s preferable to use some simple methods to analyze
the rotor with lower accuracy but with a much lower computational cost. Three theories are applicable
with this characteristics [1]: Momentum theory, blade element theory and blade element momentum
theory, that is the combination of the previous two. For each condition, hovering, climb, descent, forward
or lateral flight the aerodynamic is different and also each model has to be used in a different way. The
momentum theory gives analytical solutions, the blade element theory is more realistic but in some con-
ditions the approximations cannot simulate the reality with the necessary accuracy. The main aspect
that affects the quality of the results is the main rotor wake that is not stationary ever in stationary flight,
in fact it interacts with the tail, fuselage and control surfaces.
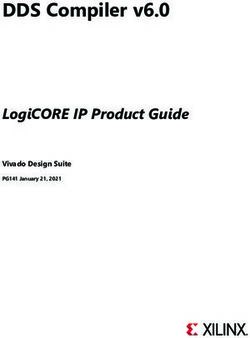
2.1 Momentum Theory
The momentum theory was established by Rankine in 1865 [29] to analyse marine propellers. The
generalization was done by Glauert in 1935 [1]. The theory idealizes the rotor as an infinitesimally thin
actuator disk over which a pressure difference exists. It’s the same to consider an infinite number of
blades with zero thickness. The actuator disk supports the thrust generated by the movement of the
rotor. The power needed is related to the torque of the rotor shaft and also an induced power related
to the gain in kinetic energy of the rotor slipstream. The theory is independent of the characteristics of
the rotor, it just takes in account the rotor diameter. All the calculations are done considering a control
volume around rotor and its wake with the applications of conservation laws[1].
This theory is based on some approximations:
• The airflow is incompressible
• Between the two surfaces of the actuator disk there is a pressure jump.
• There is no swirl velocity in the airflow
5Figure 2.1: Flow model for momentum theory analysis of a rotor in hovering condition[1]
• The airflow before and after the actuator disk is uniform.
From the conservation of mass [1]:
→
− → − →
− → −
ZZ ZZ
ṁ = ρV · d S = ρV · d S (2.1)
∞ 1
→
− →
−
where ṁ is the mass flow, ρ is the density, S is the control surface area and V represents the velocity
for each control area.
ṁ = constant → ṁ = ρA∞ (w + Vc ) = ρA(vi + Vc ) (2.2)
With the conservation of momentum [1]:
→
− → − → − →
− → − → −
ZZ ZZ
T = ρ( V · d S ) V − ρ( V · d S ) V = ṁ(Vc + w) − ṁVc = ṁw (2.3)
∞ 0
where A is the control surface area, w represent the velocity in far wake called wake velocity, vi is the
inflow velocity calculated on the rotor/disk plane and Vc is the Climb Velocity.
Finally an equation govering the conservation of energy in the flows can be written as [1]:
61 → − → − → − 1 → − → − → −
ZZ ZZ
1 1 1
P = (ρ V · d S )| V |2 − (ρ V · d S )| V |2 = ṁ(Vc + w)2 − ṁVc 2 = ṁw(2Vc + w) (2.4)
∞ 2 0 2 2 2 2
This is a scalar equation, it simply states that the work done on the fluid by the rotor is manifested as a
gain in kinetic energy of the fluid in the rotor slipstream per unit time. This is the power that the system
needs to create the pressure jump near the actuator disk.
With a combination between the result of the conservation of momentum and energy:
w
v1 = v2 = (2.5)
2
In hovering condition (Vc = 0) the thrust, T , is calculated as:
T = ṁw (2.6)
and power is:
1
P = T vi = ṁw2 (2.7)
2
In the wake below the rotor the flow velocity increases, due to continuity considerations the area of
the slipstream has to decrease. From the conservation of mass in hover condition the ratio between the
cross-sectional area of the wake to the area of the rotor is:
A∞ 1
= (2.8)
A 2
The area of the wake is the half of the rotor disk area. In term of radius is r∞ = 0.707R.
According to Leishman [1] the induced velocity at the rotor disk in hovering condition vh can be obtained:
s
T
vh = (2.9)
2Aρ
With this equation, the ideal power consumed is:
s
T
P = T vh = T = 2ρAvh 3 (2.10)
2Aρ
The power required to hover increases with the cube of the induced velocity at the disk. To make a rotor
with a given thrust but with a minimum induced power it’s necessary to increase the mass flow through
7the disk and this consequently requires a large rotor disk area [1].
Thinking in term of adimensional parameters, it’s possible to define the coefficient of thrust and the
coefficient of power.
T
CT = (2.11)
ρ(Vtip )2 A
P
CP = (2.12)
ρ(Vtip )3 A
2.2 Blade Element Theory
The Blade Element Theory (BET) is the base of analysis of helicopter rotor aerodynamics because
it provides estimation of blade aerodynamic loading in function of azimuthal and radial position [1].
In general, BET divides the blades in several sections and analyses each one as 2D airfoil able to
generate aerodynamic forces. Some corrections as tip and hub loss are taken in account with empirical
corrections. The BET can be used as basis to help design of rotor blades because, unlike the simple
momentum theory, all the characteristics of the blade are part of the theory [1].
Figure 2.2: Blade Element Theory Model[1]
In the blade element theory the angle of attack is defined as:
UP
α=θ−φ φ = arctg( ) (2.13)
UT
where α is the angle of attack, θ is the twist angle, φ is the inflow angle, UP is the component of the
velocity perpendicular to the rotor and UT is the component of the velocity paralell to the rotor.
8For each section it’s possible to compute the lift L and drag D:
1 2 1 2
dL = ρU cCl dy dD = ρU cCd dy (2.14)
2 2
where c is the chord and dy represents the width of the infinitesimal blade element.
Next step is the calculation of the perpendicular, Fz and parallel Fx forces to the rotor plane.
dFz = dLcosφ − dDsinφ (2.15)
dFx = dLsinφ + dDcosφ (2.16)
To calculate the total forces it is necessary to compute the contribution of each blade. The infinitesi-
mal coefficients of thrust and power are computed as:
dT Nb dFz 1
dCT = = = σ(Cl cosφ − Cd sinφ)r2 dr (2.17)
ρA(ΩR)2 ρA(ΩR)2 2
dP Nb dFx Ωy 1
dCP = = = σ(Cl sinφ + Cd cosφ)r3 dr (2.18)
ρA(ΩR)3 ρA(ΩR)2 2
where Ω - Rotational Velocity of the Rotor, Nb - Number of Blades and σ - Solidity of the rotor and σ and
r are calculated using:
Nb c y
σ= r= (2.19)
πR R
The aerodynamic coefficients, in particular the lift Cl and the drag Cd used in the theories are calcu-
lated with the software Xfoil.
2.3 Xfoil
The software Xfoil was developed by Mark Drela from MIT [30]. It’s able to analyse isolated subsonic
airfoils taking in account Reynolds and Mach numbers. The main outputs that the software gives are the
distribution of forces around the airfoil, how the pressure coefficient changes in both top and bottom of
the airfoil and how the lift and drag coefficients change in function of the angle of attack α.
The software is based on 2D panel method, ”analyzes using integral equation instead of differential
equation” the velocity field near the airfoil. The only input that the software requires is a database of
coordinates that represents the geometry of the profile.
Other outputs are available after the analysis:
• The coefficient of moment Cm
• The transition point between laminar and turbolent flow for bottom and top
9• The coefficient of pressure drag Cdp
Figure 2.3: Xfoil: Forces distribution around NACA 23015 airfoil
Figure 2.4: Xfoil: CP distribution around NACA 23015 airfoil
102.4 Blade Element Momentum Theory
The blade element momentum theory (BEMT) is a combination between blade element and momen-
tum approach first proposed for helicopter use by Gustafson and Gessow (1946). This theory allows the
estimation of the inflow velocity along the blade for hovering condition[1].
Figure 2.5: Annulus of rotor for local momentum analysis for hovering condition[1]
As shown in Figure 2.5, the theory consists first in the application of the conservation laws to an
annulus of the rotor disk. Each annulus gives an increment in thrust dT and it’s possible to calculate
this just with a simple momentum theory with two assumptions: 2D and no mutual effects between
successive annuli. To solve the problem of 2D restriction the tip-loss effect by Prandtl is enough. For
each annulus the area considered:
dA = 2πydy (2.20)
The incremental thrust of the annulus is the product between mass flow rate and twice the induced
velocity [1]:
dṁ = ρdA(Vc + vi ) = 2πρ(Vc + vi )ydy (2.21)
dT = 2vi dṁ = 2ρ(Vc + vi )vi dA = 4πρ(Vc + vi )vi ydy (2.22)
This is the Froude - Finsterwalder equation. It’s more convenient to work with adimensional quantities:
dT Vc + vi vi y y
dCT = =4 d (2.23)
ρ(πR2 )(ΩR)2 ΩR ΩR R R
Vc +vi Vc
Writing everything in function of total inflow λ = ΩR , climb inflow λc = ΩR and induced inflow
vi y
λi = ΩR with the adimensional radius r = R:
dCT = 4λλi rdr = 4λ(λ − λc )rdr (2.24)
With equation 2.24 is possible to compute the coefficient of induced power:
11dCP i = λdCT = 4(λ)2 (λ − λc )rdr (2.25)
The calculation of the total thrust and induced power is done by the integration along the blade:
Z r=1 Z 1
CT = dCT = 4 λ(λ − λc )2 rdr (2.26)
r=0 0
and
Z r=1 Z 1
CP i = λdCT = 4 λ2 (λ − λc )2 rdr (2.27)
r=0 0
2.5 Inflow Models
As the dynamic representation of the rotor system reaches a certain level of sophistication in term
of degrees of freedom of the blade motion, it becomes apparent that a comparable level of detail must
be used for the aerodynamic part [31, 1]. The helicopter aerodynamic is strictly related to the induced
velocities at and near the main rotor. In the past, due to the limited computational capability, the induced
inflow was considered uniform. Now, there are several non-uniform representations for each flight con-
dition. Some models can represent better the dynamic effects, others just the aerodynamic loads over
the rotor. For high accuracy simulations, CFD models able to analyse the wake are used [27, 28].
In hover condition the inflow can be determinated directly using BEM theory [1]. The principle is the
equivalence between the circulation theory of lift and the momentum theory of lift. The inflow model for
hovering is [1]:
r
σClα λc σClα σClα λc
λ(r, λc ) = ( − )2 + θr − ( − ) (2.28)
16 2 8 16 2
Equation 2.28 is function of the rotor characteristics as σ the solidity or Clα the lift-curve-slope and the
blade twist θ how the inflow changes along the blade.
From the other point of view, in forward flight, the induced velocity field is no longer axisymmetric. The
effects of the individual tip vortices produce an highly non-uniform inflow over the rotor disk, specially
V
in the range 0.0 ≤ µ ≤ 0.1 (where µ = ΩR . Introducing now the azimuthal angle ψ defined as the
angle of the blade relative to the main axis of the vehicle After that range, in high speed forward flight,
the time-averaged longitudinal inflow becomes more linear and can be approximately represented by a
linear variation in function of azimuthal angle ψ and adimensional radius r [31, 1].
x y
λi = λ0 (1 + kx + ky ) = λ0 (1 + kx r cos φ + ky r sin φ) (2.29)
R R
12The coefficient λ0 is the average induced inflow at the centre of the rotor given by the momentum theory:
CT
λ0 = p (2.30)
2 µ2 + (λ0 )2
To solve this last equation it’s necessary to impose an iterative method. The two coefficients kx and ky
are related to the wake skew angle χ that is the angle between the wake and the rotor disk.
µx
χ = arctan( ) (2.31)
µz + λ0
The two advanced ratios considered here are just the parallel and perpendicular component to the rotor
plane of the advanced ratio µ. If atpp is define as the angle between the rotor plane and the air speed,
the advanced ratios are: µx = µ cos atpp andµz = µ sin atpp . There are several estimations to calculate
the coefficients of the equation 2.29. One of the more recent that also gives good correlations with flight
test data is the Pitt-Peters model (1981) [32]:
15π χ
kx = tan( ) (2.32)
23 2
and
ky = 0 (2.33)
In hovering condition the velocity distribution perpendicular to the blade leading edge is axisymmetric
and it’s showed in Figure 2.6.
Figure 2.6: Velocity distribution in hovering condition. All the azimuthal positions show the same distri-
bution
The inflow velocities and the generated thrust depend only by the radial position and for this reason
13are axisymmetric as showed in Figure 2.7.
Figure 2.7: Inflow velocities and thrust in hovering condition [33]
Here, the thrust is defined to be negative because in the opposite direction of the inflow velocity. Near
the hub, where the inflow velocities and also the tangential velocities are smaller, low thrust is produced.
The higher part of the thrust is distributed between 50% and 90% of the blade length. Near the tip the
thrust decreases really fast due to the tip losses.
In forward flight there is no axisymmetry in the velocity field. There are three aerodynamic aspects
to be considered: dynamic stall, reverse flow and transonic effect. In the retreating blade near the tip the
blade increases a lot the angle of attack to compensate the reduction of lift produced by the decreasing
of the local airspeed. When the forward flight increases above a certain level the blade encounters the
dynamic stall. In the reverse flow region, the rotational velocity is slower than the aircraft airspeed and
the air flows from the trailing to the leading edge of the airfoil. In the other side, the blade near ψ = 90·
has a velocity that is the sum of the rotational and forward speed V = ΩR + Vf orward . The velocity
distribution is showed in Figure 2.8.
Figure 2.8: Velocity distribution in Forward Flight with Reverse Flow Region
142.6 Flapping
Helicopter rotors are articulated with flapping and lead-lag hinges at the root of each blade. Modern
rotor hubs are hinge-less but allow motion about a virtual hinge location. The blade, essentially, presents
three mechanical hinges that allow three different movements: flapping, lead or lag and feather. The
blade flapping is the up and down movement of the rotor blade important to reduce the dissymetry of lift
due to the different local speed between advancing blade side and retreating blade side. The lead-lag
hinge allows in-plane motion of the blade in response to the Coriolis accelerations and forces produced
by the flapping. Finally, the feather is the ability to change the blade pitch. These hinges allow each
blade to independently flap and lead or lag with respect to the hub plane [1]. In hovering condition the
blades reach a steady equilibrium position under the action of aerodynamic and centrifugal forces. The
equilibrium angle, with respect to the hub plane, is called coning angle β0 and it’s calculated with the
equilibrium of aerodynamic moment, Mβ , and centrifugal moment MCF , in relation to the flapping hinge
[1]:
Mβ + MCF = 0 (2.34)
and the coning angle:
RR
3 eR Lydy
β0 = (2.35)
M Ω2 R2 (1 + e)
where L is the lift, y is the radial position, M is the mass of the blade (equally distribuited), R is the total
radius of the blade and e is the eccentricity of the flapping hinge.
This equation is valid for any form of aerodynamic load over the blade [1].
In forward flight the blades flap up and down in a periodic manner with respect to azimuth due to
cyclically varying air-loads [1]. Considering Figure 2.9, the flapping angles are functions of aerodynamic,
centrifugal and inertial forces.
Z R Z R Z R
d(MCF ) + d(I) + d(Mβ ) = 0 (2.36)
0 0 0
The equation of flapping motion becomes:
Z R
Ib β̈ + Ib Ω2 β = Lydy (2.37)
0
where Ib is the moment of inertia of the blade about the flap hinge.
Considering that the azimuthal position ψ = Ωt and the rotational speed is constant:
? ??
β̇(t) = Ωβ(ψ) β̈(t) = Ω2 β(ψ) (2.38)
15Figure 2.9: Flapping hinge with aerodynamic, centrifugal and inertial loads [1]
So the final equation for flapping is [1]:
Z R
?? 1
β(ψ) + β(ψ) = Lydy (2.39)
Ib Ω 2 0
In forward flight the aerodynamic forces act at multiples of the rotor frequency. For this reason the blade
flapping motion can be represented by an infinite Fourier series [1]:
∞
X
β(ψ) = β0 + (βnc cos nψ + βns sin nψ) (2.40)
n=1
For simple analysis it’s possible to assume that the solution for blade flapping motion is given by the
first harmonics only [1]:
β(ψ) = β0 + β1c cosψ + β1s sinψ (2.41)
2.7 Fmincon and Global Search
Fmincon is a Matlab function able to find the minimum of constrained non-linear multi-variable func-
tion [34]. It’s part of the optimization toolbox of Matlab. The reason to use an optimization function is
the reduction of calculation time. Another solution is a parametric analysis but just with a few variables
the computational cost becomes really high. The function finds a local minimum near the initial condi-
tions given in input. In all the engineering applications an optimized condition corresponds to a global
minimum. To solve this problem Fmincon works together with a Global Search that generates a family
of initial conditions to calculate all the local minima in the range considered and after that the algorithm
selects the global minimum [35].
16Chapter 3
Implementation
3.1 Numerical Model
To analyse the aerodynamic characteristics of the helicopter a model based on Blade Element Mo-
mentum theory and Blade Element theory is used. The characteristics of the airfoils are taken from the
software XFoil [30], a 2D simulation code based on panel method developed by Mark Drela in MIT. In
this thesis all the simulations are done on a Sikorsky UH-60A Black Hawk. For this reason the airfoils
analysed are the two used on the UH-60A main rotor: SC 1095 and SC 1094 R8 [36]. In Figure 3.1 and
Figure 3.2 are presented the characteristics of UH-60A airfoils with angle of attack α = 3◦ .
Figure 3.1: Sikosrky SC 1095 Airfoil with α = 3◦
The two main parameters, for this kind of analysis, are the coefficients of lift and drag:
Cl = f (α) (3.1)
17Figure 3.2: Sikosrky SC 1094 R8 Airfoil with α = 3◦
and
Cd = g(α) (3.2)
The results don’t represent continuous functions, they are given for several angles of attack α with
∆α = 0.25◦ as step. To implement an optimization code the input data have to be continuous so an
interpolation is required. The database is interpolated using polynomial equations and the order is
chosen to achieve the best fitting possible. The total error for each polynomial order is studied and the
results are showed in Figure 3.3 and Figure 3.4.
Figure 3.3 and Figure 3.4 represent how the total fitting error changes with the order of the polynomial
equation. The two points chosen represent a good compromise between computational cost and error.
The results of the interpolation are presented in Figure 3.5 and Figure 3.6:
In general, simple models use a linear equation to represent lift curve and a quadratic one for the
drag curve. High order polynomial equation can also represent stall condition and drag bucket to really
take in account all the airfoil informations.
To describe hovering and forward flight conditions two models are taken in account. In hover, using the
equivalence between the circulation and momentum theories of lift, Blade Element Momentum Theory
(BEMT) allows the estimation of the inflow distribution along the blade. Considering no climb velocity
the simplified model is [1, 31]:
r
σClα 32F
λ= ( 1+ θr − 1) (3.3)
16F σClα
Using this model, it’s possible to estimate the inflow in function of the twist distribution. In forward
flight, the helicopter must provide a lifting force and a propulsive force in opposition of weight and air-
frame drag. The rotor moves through the air and all the blade sections encounter a periodic variation
in local velocity. There are some consequences as blade flapping, unsteady effects, non-linear aerody-
18Figure 3.3: Error Analysis CL vsα
Figure 3.4: Error Analysis CD vsα
namics, stall, reverse flow and an higher interference between rotor wake and the main rotor itself [1].
The induced velocity field is no longer axisymmetric and the effects of the individual tip vortices tend
to produce a highly non-uniform inflow over the rotor disk specially during the transition from hover into
forward flight, within the range 0.0 ≤ µ ≤ 0.1.
19Figure 3.5: Interpolation CL vsα with 10 order polynomial equation
Figure 3.6: Interpolation CD vsα with 12 order polynomial equation
In higher speed forward flight (advanced ratio higher than 0.15) the time averaged longitudinal inflow
becomes more linear and can be approximately by [31, 32, 1]:
λi = λ0 (1 + kx r cos ψ + ky r sin ψ) (3.4)
20The estimated values of first harmonic inflow considered in this paper is that one from Pitt and Peters
(1981) that has a good representation of the inflow gradient as functions of the wake skew angle and the
advanced ratio when compared to the experimental data [1, 32].
The BEM theory assumes that the blades can be divided into small elements that operate aerody-
namically as 2D airfoils and the aerodynamic forces can be calculated considering just the local flow
conditions [1]. Due to the simplicity of the theory the assumption that the airflow field around the airfoil is
always in equilibrium is necessary. To understand what is the minimum number of blade elements that
the analysis requires, it’s necessary to analyse how the total power changes in function of the number
of blade elements. Hovering and high speed forward flight conditions are considered. So, to compute
the thrust and power of the main rotor the component of the velocity parallel to the rotor and normal to
the blade leading edge UT and the component of the velocity perpendicular to the rotor UP have to be
considered:
UT (y, ψ) = Ωy + µΩR sin ψ (3.5)
UP (y, ψ) = λi ΩR + y β̇(ψ) + µΩRβ(ψ) cos ψ (3.6)
Where y is the radial coordinate, Ω the rotor shaft speed and R the maximum radius of the blade. The
angle of attack α can be expressed in function of the twist angle θ and the inflow angle φ :
UP
α=θ−φ φ = arctan( ) (3.7)
UT
The incremental lift dL and drag dD are:
1 2 1 2
dL = ρU cCl dy dD = ρU cCd dy (3.8)
2 2
where c is the chord, Cl = f (α) = f2 (y, ψ) and Cd = g(α) = g2 (y, ψ). So the equations of thrust T and
power P can be written as:
ZZ ZZ
T = Nb dFz = Nb (dL cos φ − dD sin φ) (3.9)
ZZ ZZ
P = Nb dFx Ωy = Nb (dL sin φ + dD cos φ)Ωy (3.10)
where Nb is the number of blades, dFx the force parallel to the rotor disk and dFz the force perpendicular.
Replacing equations 3.8, 3.5, 3.6 inside thrust and power equations 3.9 and 3.10 also the thrust and
power are expressed in function of azimuth angle ψ and radial position y. So, in a general form:
dFz = Fz (y, ψ)dydψ dFx = Fx (y, ψ)dydψ (3.11)
So the integrals become:
21RZmaxZ2π
T = Nb Fz (y, ψ)dydψ (3.12)
Rmin 0
RZmaxZ2π
P = Nb ΩyFx (y, ψ)dydψ (3.13)
Rmin 0
To implement these equations in a computational code the integrations have to be replaced with
summations. So the blade is divided in a finite number of sections with a width of ∆y.
Rmin
1− Rmax
∆y = (3.14)
N
Where Rmin is the minimum radius of the blade, Rmax the maximum radius and N the number of the
elements considered. To understand the minimum number of blade elements two analysis in hovering
and forward flight conditions are considered.
Figure 3.7: Power consumption of UH-60A in hovering
Also in forward flight the aerodynamic field for each azimuthal position is different. From the math-
ematical point of view it’s enough to perform an azimuthal integration between 0 to 2π to obtain exactly
the power consumption and the induced power. With a computational code it’s not possible to consider
infinite number of blade elements, so in the next error analysis it’s presented what is the minimum num-
ber of azimuthal position to have a good compromise between quality of the results and computational
time.
Figure 3.9 shows that at least the code needs the aerodynamic characteristics of 100 blades to
22Figure 3.8: Power consumption of UH-60A in forward flight
Figure 3.9: Power consumption of UH-60A convergence increasing the azimuthal positions
represent the rotor power consumption.
There are also some corrections to take in account like hub loss [37, 1], tip loss [37, 1] and reverse flow
[1]. The only correction that is not considered is the compressibility effects in high speed forward flight
that increase the drag. At higher rotor advance ratios, there is a considerable amount of reverse flow on
the retreating side of the rotor disk. The region with reverse flow is characterized by UT ≤ 0. To take
in account the effects of the reverse flow it’s enough to change the sign of the drag in this region. The
23coefficient of profile power can be computed as:
Z2πZ1 Z2π −µZsin ψ
σCdo 3 σCdo
CP o = (r + µ sin ψ) drdψ − (r + µ sin ψ)3 drdψ (3.15)
2π 2π
0 0 π 0
For the hub and tip loss two corrections are considered, because BEM theory permits a finite lift to
be produced at the blade root and tip that it’s unrealistic. There is a factor B [37, 1] used to represent
the effective blade radius that can produce lift. The parameter is around 0.95 for the Hub relation while
for the tip loss the Prandtl tip-loss function is considered. The latter considers a solution to the problem
of the loss of lift near the tips taking in account the induced effects related with a finite number of blades.
So, in the equation there is the number of the blades Nb . The equation is considered for each azimuthal
position and then averaged. The two relations for hub and tip are pretty similar [1]:
Nb 1 − r
f= (3.16)
2 rφ
B r − rmin
f= (3.17)
2 rφ
and the correction factor F [1] is calculated for each situation as:
2
F = arccos(e−f ) (3.18)
π
Another model taken in account is one for the fuselage drag that is important to understand how the
coefficient of thrust has to change to compensate weight and drag of the helicopter. The model used is
[1]:
1 2
D= ρV fdrag Aeq (3.19)
2
where the drag parameter fdrag and the equivalent wetted area Aeq are related with the helicopter type.
The model has also a flapping consideration [1]. The hinge offset is neglected to simplify the calculation
and the second order differential equation is [1]:
ZR
?? 1
β+β = Lydy (3.20)
Ib Ω 2
0
where for definition the flapping β is function of the azimuthal position ψ:
β = β(ψ)
The code is implemented in Matlab and it’s able to compute, using some optimization tools, the
twist distribution that minimizes the power for each flight condition. The function from the optimization
tool of Matlab is ’Fmincon’ [34] combined with a global search [35] for the minimum. This function can
24calculate a local minimum given initial conditions while the global search creates a system of different
initial conditions to obtain all the minimum solutions and after it will take the global one. To obtain the
flapping solution an ordinary differential equation solver ’ode45’ is used. This solver is based on Runge-
Kutta methods, a family of implicit and explicit iterative methods used in temporal discretization for the
approximate solutions of ordinary differential equation (ODE) [38].
3.2 Verification and Validation
To validate the method the flight data of the UH-60A helicopter is used [36, 39, 40, 41]. To make a
comparison between simulations and flight data all the typologies of power have to be taken in account.
The code calculates the main rotor induced power, main rotor profile power and fuselage parasitic power.
So an estimation of the tail rotor power is necessary. In table 3.1 some characteristics of the tail rotor
are presented:
Table 3.1: UH-60A Tail Rotor Characteristics [19]
Tail Rotor Parameters
Tail Rotor Radius 1.6764 m
Nominal tail rotor speed 124.62 rad/s
Tail Rotor Blade Chord 0.2469 m
Tail Rotor Blade Twist Linear −18◦
Blade Airfoil SC 1095
Number of Blades 4
The tail rotor has to be able to generate a force to counterbalance the torque in the main rotor. Four
conditions are considered: hovering, low, medium and high speed forward flight. For each of these
conditions the coefficient of thrust of the tail and its power consumption is calculated. In all of these
simulations the power consumption of the helicopter increased of 5%. The distance between the hub
centre of the tail rotor and the rotor shaft in the UH-60A is 9.926 m. In all the calculations the weight of
the helicopter is W = 8322.4 kg [19].
Table 3.2: UH-60A Data [19]
Main Rotor Parameters
Main Rotor Radius 8.1788 m
Nominal Main Rotor Speed 27.0 rad/s
Blade Chord Lenght 0.5273 m
Blade Twist Nonlinear
Blade Airfoil SC 1095 / SC 1094R8
Number of Blades 4
Blade Mass per unit length 13.92 kg/m
The blade twist of the UH-60A is non linear and presents some transition areas for the presence of
different airfoils. To simplify the calculation that behaviour is approximated by a linear blade twist of −16◦
25and only the SC 1095 airfoil. Figure 3.10 shows the comparison between flight test and the results from
the method. Due to the limitation related to the linear model applied in low advanced ratio range, the
calculations are done for advanced ratio higher than 0.075.
Figure 3.10: Comparison Power consumption of UH-60A between Flight Test Data and Blade Element
theory
The predictions, using this simple model, are in good agreements with the flight test data and for that
reason it’s verified the application of this method in the analysis of the helicopter performance.
3.3 Effect of Blade twist on Main Rotor Power
High twisted blades improve hover, vertical climb and low speed performance, for example, for mil-
itary helicopters nap-of-the-earth performance capability [42, 43]. From the aerodynamic point of view
in hovering condition, the result is a more uniform downwash velocity in the far wake that corresponds
to a reduction of induced power required [42]. In 1987 Keys et al. [42] conducted a test to quantify
the effect of twist on performance and aicraft vibrations. They considered a four bladed rotor with Mach
scaled composite blades and they tested it in a wind tunnel with two linear twist distributions: −11.5◦
and −17.3◦ . Increasing the blade twist, in hovering condition, showed a reduction of 2.4% on power
required that corresponds in a 5% increase in useful load [42]. The experiment also showed that the
new redistributed downwash velocity in the inboard part of the rotor increased the aerodynamic load on
the fuselage of 6%. So, the benefit of the twist was reduced of 15% [42].
26θ0
According to the theory [1], in hovering situation an hyperbolic variation of twist y has the minimum
induced power. This solution is not physically possible because it’s not feasible to build a blade with this
shape (the angle near the root would be too big). Nevertheless a linear twist distribution can improve
the performance is a similar way as the hyperbolic twist variation.
The characteristics of UH-60A Sikorsky table 3.2 are used to show the effect of blade twist using
BEM theory for hovering condition and BET for forward flight. There are some differences from the real
helicopter: in this analysis only the SC 1095 airfoil is considered and the twist distribution is linear or at
least without twist. In fact the comparison is among 5 blade twist behaviours: no twist, −4◦ linear twist,
−8◦ linear twist, −12◦ linear twist ,−16◦ linear twist.
Figure 3.11: Total power for different linear twist distributions in Hovering
Figure 3.11 shows the effect of different twist distributions in hovering condition. This example used
a linear twist variation and the same profile SC 1095 on the blade. The coefficient of power decreases if
the linear twist slope is increased. This is not true for the simulation with -16◦ because when the blade
twist is increased, the inner part of the blade has an angle of attack higher than the angle of attack in
stall condition. If this section is between the hub and the root cut-out the effect is not presented but if the
blade twist increases above a certain value that section will produce less lift and more drag. Considered
a helicopter and a twist distribution along the blade there is only an optimum condition that minimizes the
power consumption. In the case of the UH-60A Sikorsky with SC 1095 airfoil and linear twist behaviour
the optimized solution is -13.5◦ . So a solution with -16◦ presents higher twist slope than the optimal one.
This solutions came from an analysis with BEM theory with tip and hub losses and airfoil characteristics
from the simulation of Xfoil. Also, the reduction of the benefit of the download [42] is not considered.
In forward flight the effect of blade twist is different. In 1948 there was a study [44] that indicated that
higher blade twist reduced forward flight power based on flight test data. This conclusion looks wrong
27but in that period the early helicopters were limited to 130km/h, in low speed forward flight highly twist
blades are able to reduce the coefficient of power as shown in Figure 3.12.
Figure 3.12: Total power for different linear twist distributions in low speed forward flight
Modern helicopters can easily reach a speed of 300km/h. The required blade twist distribution to
minimize the power consumption slowly decreases if the forward flight increases. The results are showed
in Figure 3.13 and Figure 3.14.
Figure 3.13: Total power for different linear twist distributions in medium speed forward flight
In Figure 3.13 it’s evident that after µ = 0.18 the linear twist distribution with −8◦ of slope becomes
the solution that requires less power. Finally, in Figure 3.14, in high speed forward flight a linear twist
behaviour of −4◦ presents better results.
Keys et all in 1987 [42] studied the four bladed rotor with Mach scaled composite blades also in
forward flight with the two linear twist distributions of −11.5◦ and −17.3◦ . The solution with high twisted
blade presented a measured power increment of 5% at 330km/h. They also calculated that the helicopter
with −17.3◦ linear twist distribution presented the same power consumption of the −11.5◦ at 330km/h
around 322.5km/h. So the performance penalty due to twist was approximately 7.5km/h.
28Figure 3.14: Total power for different linear twist distributions in high speed forward flight
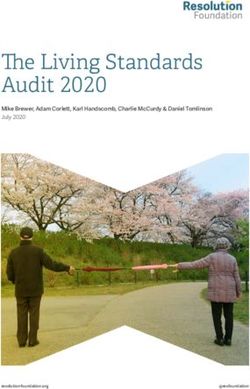
In 2015 Han et all [19] studied the effect of variable rotor speed and variable blade twist to reduce
rotor power and improve helicopter performance. They developed an empirical aerodynamic model and
a CFD model. The empirical one includes a main rotor model, a fuselage model, a tail rotor model and
a propulsive trim method. The model developed was complex, in fact took in account also an elastic
deformation of the rotor blades. The inflow model was the Pitt-Peters [32]. They considered all of these
effect in the equations of motion based on the generalized force formulation and used the Newmark
integration method to integrate in time domain. With this model they analysed the UH-60A Sikorsky
according to the characteristics of the table 3.2. The result is presented in Figure 3.15.
Figure 3.15: Comparison among different twist behaviours [19]
29You can also read