Duc Ngoc Pham A Framework of a Power Management System for a Hybrid Electric VTOL Aircraft using Optimal Control - DSpace@MIT
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
A Framework of a Power Management System for a Hybrid Electric VTOL Aircraft using Optimal Control by Duc Ngoc Pham B.S., United States Air Force Academy (2020) Submitted to the Department of Aeronautics and Astronautics in partial fulfillment of the requirements for the degree of Master of Science in Aeronautics and Astronautics at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY May 2022 © Massachusetts Institute of Technology 2022. All rights reserved. Author . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Department of Aeronautics and Astronautics May 17, 2022 Certified by . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Choon Sooi Tan Senior Research Engineer Thesis Supervisor Accepted by . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Jonathan P. How R.C. Maclaurin Professor of Aeronautics and Astronautics Chair, Graduate Program Committee

2
A Framework of a Power Management System for a Hybrid Electric VTOL Aircraft using Optimal Control by Duc Ngoc Pham Submitted to the Department of Aeronautics and Astronautics on May 17, 2022, in partial fulfillment of the requirements for the degree of Master of Science in Aeronautics and Astronautics Abstract The operation of a hybrid fixed-wing vertical takeoff and landing unmanned aerial vehicle (VTOL UAV) is assessed using an optimal control framework for the most energy-efficient and time-efficient trajectories. The UAV is equipped with a modu- lar hybrid propulsion system (MHPS) where the electrical and carbon-fuel system components are interchangeable on a mission-to-mission basis, enabling aircraft per- formance flexibility. The framework is used to assess the effects of MHPS electric power hybridization, energy hybridization mass ratio, and peak power output on UAV performance during demanding phases of flight, which include takeoff, landing, and hover. Results showed that the most time and energy efficient takeoff trajecto- ries involved minimizing the vertical displacement gained during the transition from vertical to horizontal flight. The power management strategy for minimum energy consumption during takeoff, landing, and hover was largely dictated by propulsion component efficiencies; maximizing the electric motor power and minimizing the car- bon fuel power would reduce energy consumption. As peak power output and electric power hybridization increased, takeoff and landing energy consumption decreased. Minimum time takeoff and landing trajectories and power management strategy were only dependent on power-to-weight ratio; a higher peak power output reduced takeoff and landing time. The power management strategy for efficient hover mirrored that of takeoff and landing; a higher peak power output resulted in less energy consumed. A preliminary assessment of the tradeoffs of electrification was conducted using a takeoff/cruise endurance non-dimensional performance group given as the ratio of the product of peak power output and cruise endurance to the total energy consumed during takeoff. Increasing electric power hybridization adversely affected overall air- craft performance, due to the reduction in cruise range and endurance. For each selected value of electric power hybridization, there is an optimal peak power output that strikes the best balance between takeoff and cruise performance. For short, de- manding mission segments, like takeoff or landing, the energy hybridization mass ratio has a smaller impact than electric power hybridization, since range or mass changes are not of concern when analyzing independent takeoff or landing performance. 3
Thesis Supervisor: Choon Sooi Tan Title: Senior Research Engineer 4
Acknowledgments First and foremost, I would like to thank my research advisor Dr. Tan. His optimism, careful guidance, and endless patience were invaluable over the last two years. I feel lucky to have a strong technical advisor with such empathy and flexibility. Without his enthusiasm and support, I would not have been able to complete this thesis. I would like to give a special thanks to the Northrop Grumman Corporation for supporting this research. Program manager Rob Talbert, Dr. Robert Gamache, and Alan Stull were instrumental in making this possible. Additional appreciation goes to the students, staff, and faculty of the MIT Gas Turbine Lab. Special thanks to Laurens Voet for his immense help and constant support across countless tutorial and debugging sessions; I hope we can go skiing again soon. Thanks to Alex Kunycky for introducing me to MIT and for laying the foundations for this research. Many thanks to Albert; I couldn’t have asked for a better pandemic roommate. Thanks to Manwei and friends for the weekday park skiing and gym sessions, Marek for being a fellow film enthusiast and NTU comrade. Finally, I would like to thank my family. Thank you Mom, Dad, Cathy, Angela, and Coco for always welcoming me home for much needed breaks and for encouraging me to be the best person I can be. I am forever grateful. 5
6
Contents 1 Introduction 15 1.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 1.1.1 Aircraft Propulsion Systems . . . . . . . . . . . . . . . . . . . 15 1.1.2 Vertical Takeoff and Landing Unmanned Aerial Vehicles . . . 16 1.2 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 1.3 Literature Review . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 1.3.1 Modular Hybrid Propulsion System . . . . . . . . . . . . . . . 18 1.3.2 Power Management for Hybrid Electric Aircraft . . . . . . . . 19 1.4 Research Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 1.5 Thesis Scope . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 1.6 Original Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . 22 1.7 Thesis Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 2 Technical Approach 25 2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 2.2 Aircraft model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 2.3 Modular Hybrid Propulsion System . . . . . . . . . . . . . . . . . . . 27 2.4 Hybrid Propulsion System Performance . . . . . . . . . . . . . . . . . 29 2.5 VTOL Specific Phases of Flight . . . . . . . . . . . . . . . . . . . . . 30 2.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 3 Mission Assessment Framework 33 3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 7
3.2 Dymos and OpenMDAO Software . . . . . . . . . . . . . . . . . . . . 34 3.3 Dymos Phases and Trajectories . . . . . . . . . . . . . . . . . . . . . 34 3.4 Optimization Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . 36 3.5 Optimal Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37 3.5.1 Defining ODEs . . . . . . . . . . . . . . . . . . . . . . . . . . 37 3.5.2 Controls and Parameters . . . . . . . . . . . . . . . . . . . . . 38 3.5.3 Constraints . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 3.5.4 Objective Function . . . . . . . . . . . . . . . . . . . . . . . . 39 3.6 Mission Assessment Framework . . . . . . . . . . . . . . . . . . . . . 39 3.6.1 Flight Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . 40 3.6.2 Aerodynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . 41 3.6.3 Atmosphere . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42 3.6.4 Propulsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43 3.6.5 Power Management . . . . . . . . . . . . . . . . . . . . . . . . 43 3.6.6 Fuel Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44 3.6.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 4 Results and Discussion 47 4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47 4.2 Takeoff Trajectory Results . . . . . . . . . . . . . . . . . . . . . . . . 48 4.2.1 Takeoff Minimum Energy . . . . . . . . . . . . . . . . . . . . 48 4.2.2 Takeoff Minimum Time . . . . . . . . . . . . . . . . . . . . . . 52 4.2.3 Effect of Hybridization Level on Energy-Optimal Takeoff . . . 55 4.2.4 Effect of Hybridization Level on Time-Optimal Takeoff . . . . 57 4.3 Landing Trajectory Results . . . . . . . . . . . . . . . . . . . . . . . 58 4.3.1 Landing Minimum Energy Consumed . . . . . . . . . . . . . . 59 4.3.2 Landing Minimum Time . . . . . . . . . . . . . . . . . . . . . 62 4.3.3 Effect of Hybridization Level on Energy-Optimal Landing . . . 64 4.3.4 Effect of Hybridization Level on Time-Optimal Landing . . . . 65 4.4 Hover Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67 8
4.4.1 Minimum Energy Consumed . . . . . . . . . . . . . . . . . . . 67 4.4.2 Effect of Hybridization Level on Energy-Optimal Hover . . . . 70 4.5 Preliminary Assessment of Electrification Tradeoffs . . . . . . . . . . 70 4.5.1 Cruise Range/Endurance Estimation . . . . . . . . . . . . . . 71 4.5.2 Takeoff Performance Group Results . . . . . . . . . . . . . . . 73 4.6 An Integrated Mission for Demonstrating Framework Capability and Utility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74 4.6.1 Minimum Energy Simple Mission . . . . . . . . . . . . . . . . 75 4.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79 5 Summary and Conclusion 81 5.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81 5.2 Primary Findings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82 6 Recommendations for Future Work 83 A Additional Figures 85 9
10
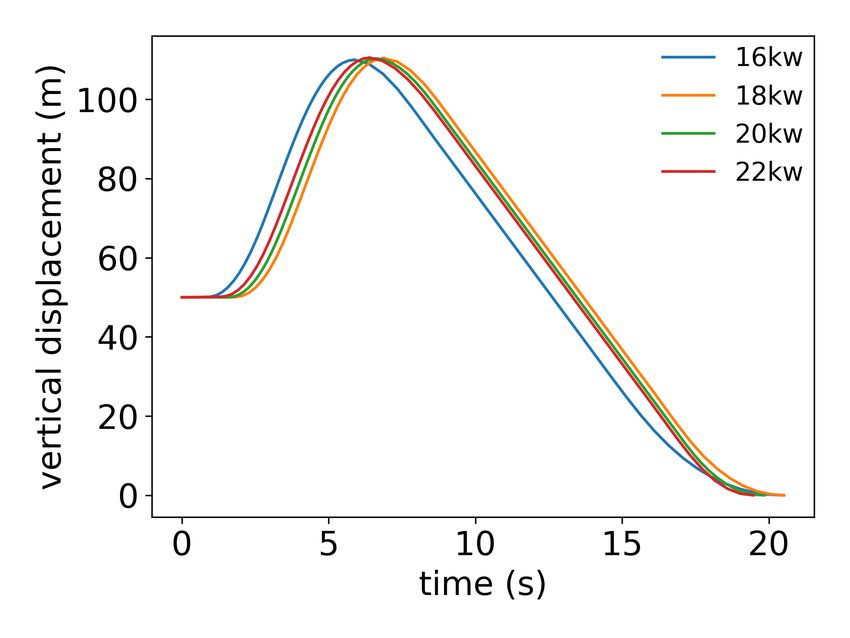
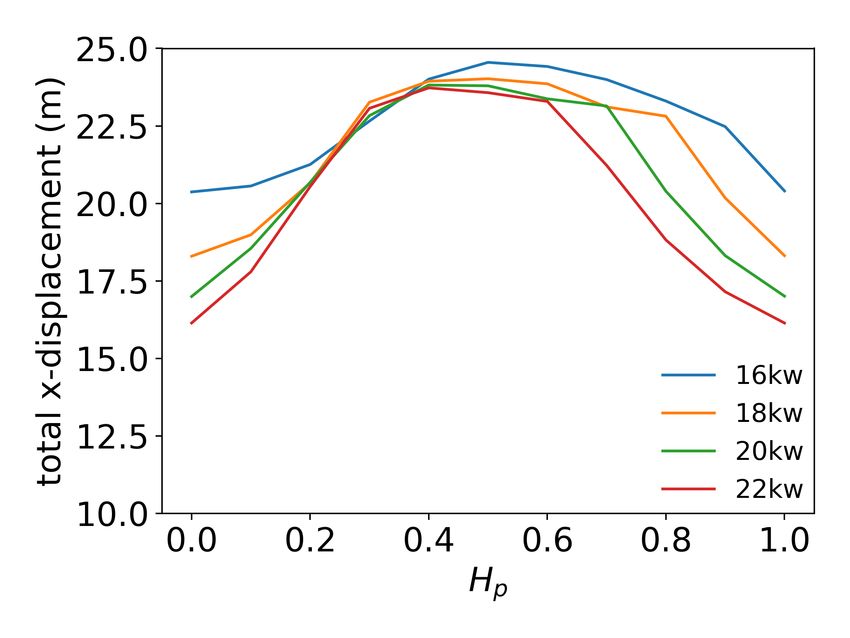
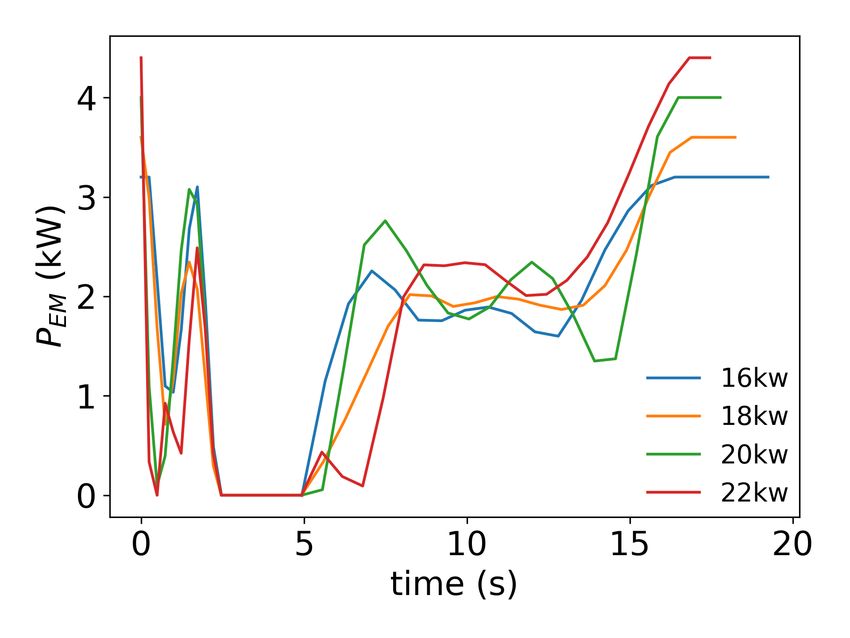
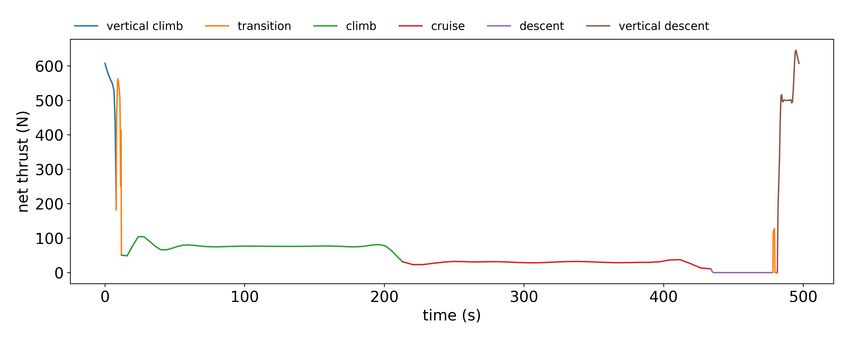
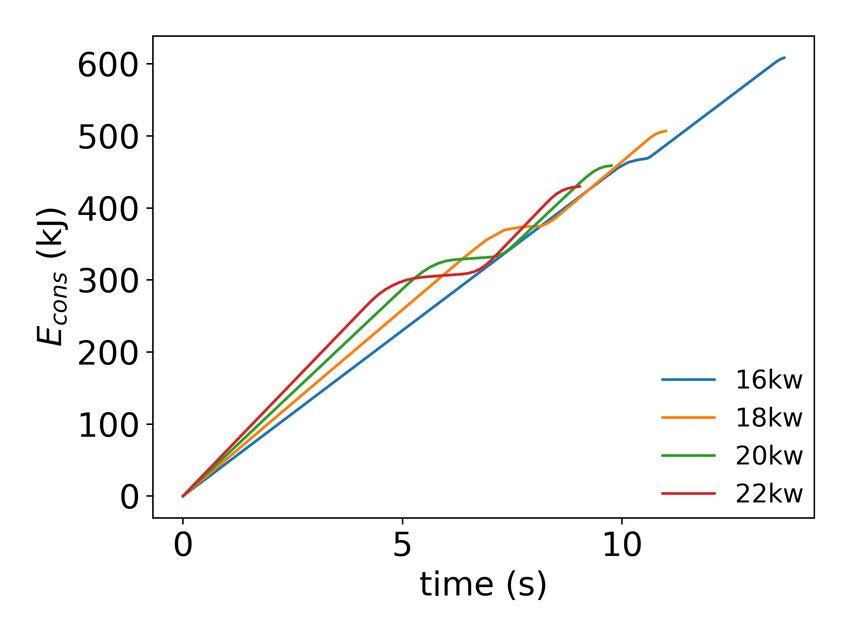
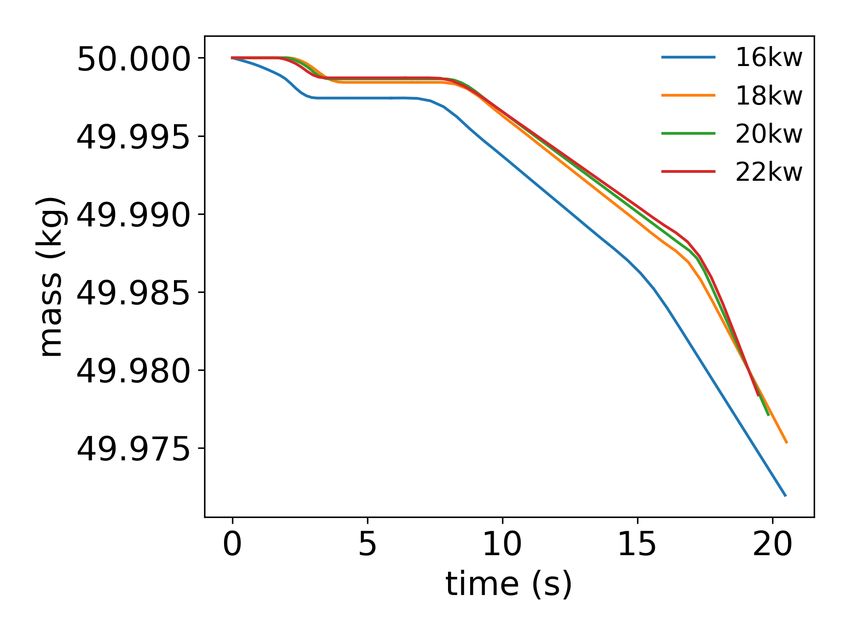
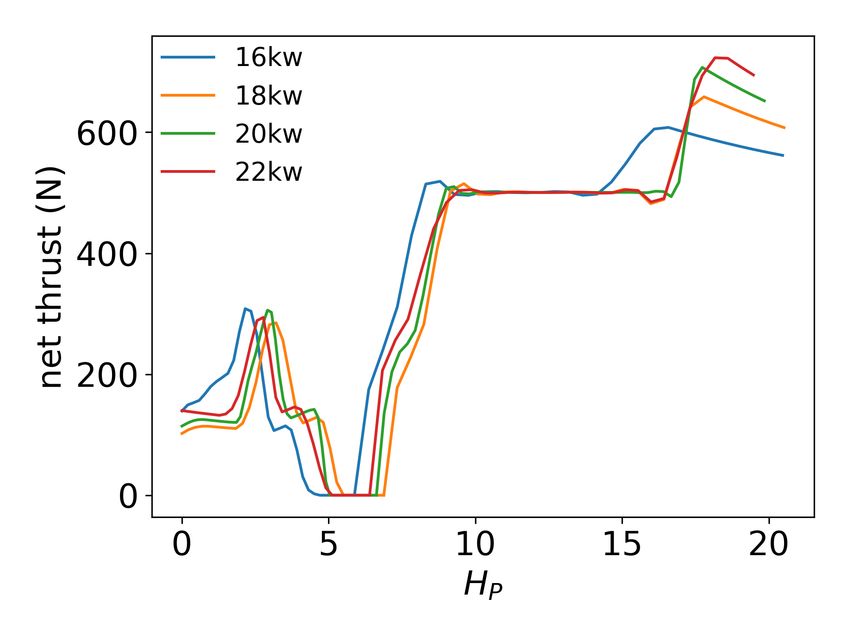
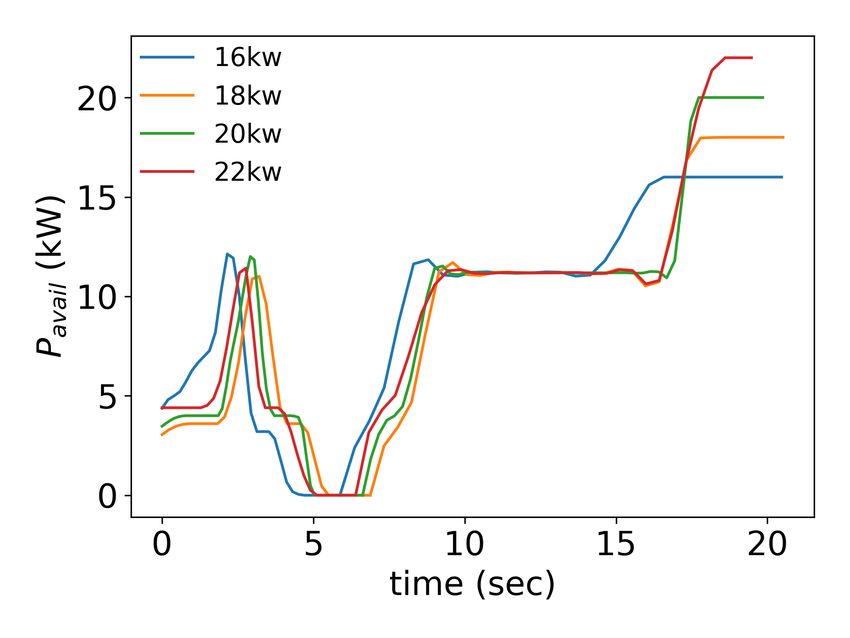
List of Figures 1-1 A single airframe for a GA aircraft could potentially take on several diverse roles with a MHPS. . . . . . . . . . . . . . . . . . . . . . . . . 19 1-2 Parallel hybrid drivetrain model. . . . . . . . . . . . . . . . . . . . . 20 2-1 MHPS Architecture and component groups. . . . . . . . . . . . . . . 28 2-2 Vertical landing of tail-sitter unmanned aerial vehicle. . . . . . . . . . 32 3-1 Extended design structure matrix of the trajectory model to design the energy management system of the hybrid UAV. . . . . . . . . . . . . 41 3-2 Free Body Diagram (FBD) of the VTOL UAV during the cruise phase. 42 3-3 Suter TOA 288 Fuel Consumption. . . . . . . . . . . . . . . . . . . . 44 4-1 Optimal states and control for an energy-efficient tailsitter takeoff. . . 51 4-2 Optimal states and control for an time-efficient tailsitter takeoff. . . . 54 4-3 Effect of power hybridization level on energy-optimal takeoff. . . . . . 56 4-4 Effect of power hybridization level on time-optimal takeoff. . . . . . . 58 4-5 Optimal states and control for an energy-efficient tailsitter landing. . 61 4-6 Optimal states and control for an time-efficient tailsitter landing. . . 63 4-7 Effect of power hybridization level on energy-optimal tailsitter landing. 65 4-8 Effect of power hybridization level on time-optimal tailsitter landing. 66 4-9 Optimal states and control for an energy-efficient tailsitter hover. . . 69 4-10 Effect of power hybridization level on energy-optimal hover . . . . . . 70 4-11 Energy-Optimal Takeoff/Cruise Performance . . . . . . . . . . . . . . 73 4-12 Optimal states for an energy-efficient UAV mission. . . . . . . . . . . 77 11
4-13 Optimal states and control for an energy-efficient UAV mission. . . . 78 A-1 Additional states for an energy-optimal tailsitter takeoff ( = 0.2). . 85 A-2 Additional states for an time-optimal tailsitter takeoff ( = 0.2). . . 86 A-3 Additional states for an energy-optimal tailsitter landing ( = 0.2). 87 A-4 Additional states for an time-optimal tailsitter landing ( = 0.2). . 88 12
List of Tables 3.1 Mission Assessment Framework and State Variables . . . . . . . . . . 40 3.2 Equation of Motion State Variables and Rate Sources . . . . . . . . . 40 4.1 Takeoff Trajectory definition: a combination of a vertical climb and transition phase with boundary constraints (I: initial; F: final), path constraints and controls. . . . . . . . . . . . . . . . . . . . . . . . . 48 4.2 Landing Trajectory definition: a combination of a transition and verti- cal descent phase with boundary constraints (I: initial; F: final), path constraints and controls. . . . . . . . . . . . . . . . . . . . . . . . . 59 4.3 Hover Trajectory definition: 15-minute hover phase with boundary constraints (I: initial; F: final), path constraints and controls. . . . . 67 4.4 Takeoff Trajectory definition: a combination of a vertical climb and transition phase with boundary constraints (I: initial; F: final), path constraints and controls. . . . . . . . . . . . . . . . . . . . . . . . . 75 13
14
Chapter 1 Introduction 1.1 Background 1.1.1 Aircraft Propulsion Systems The majority of modern aircraft rely on carbon-fuel based propulsion systems; ex- amples include internal combustion engines (ICEs), turboprops, turbojets and tur- bofans. While carbon-fuel based propulsion systems offer high specific energy, they suffer from mechanical complexity, relatively low rate of technological improvement, and scale-dependent specific power [17]. Electrified propulsion systems have been suggested as a solution to the deficien- cies of traditional carbon-fuel propulsion systems. Benefits include lower mechanical complexity, reduced environmental impact, and relatively scale-independent specific power levels. These design advantages, namely lower mechanical complexity, have en- abled electrified propulsion systems to be utilized in novel designs such as swiveling engines and distributed propulsion schemes. However, the major challenge for electric aircraft is the low energy density of batteries compared to liquid fuel – carbon fuel specific energies are superior to battery specific energies by a factor of approximately 60 [16]. This limitation restricts the range and endurance of an electric aircraft to a fraction of what is capable for a carbon fuel powered aircraft. To utilize the advantages provided by electrical propulsion systems while main- 15
taining the flight time/range of carbon fuel propulsion systems, electric-carbon fuel hybrid propulsion systems have increasingly come under assessment followed by re- search and development for use in aircraft. Hybrid propulsion systems of this type utilize carbon-fuel to provide the majority of energy while utilizing electric propulsion system components to provide power and design flexibility. While hybrid propulsion systems show promise in enabling step changes in aircraft performance enhancement, there are few flown hybrid aircraft and there is no existing set of unified design stan- dards or practices. 1.1.2 Vertical Takeoff and Landing Unmanned Aerial Vehicles Electrical complexity, thermal management, and lack of experience limit practical usage of electrified propulsion on larger aircraft. As a result, small aircraft, such as unmanned aerial vehicles (UAVs), stand to benefit most from the implementation of hybrid-electric propulsion systems. Unmanned aerial vehicles are aircraft flown via self-control or remote-control without a human pilot on board. In recent years, demand for vertical takeoff and landing (VTOL) UAVs has grown significantly due to their low cost and flexibility. UAV missions consist of many phases, including takeoff, climb, cruise, loiter, dash, etc. As a result, UAV airframes and propulsion systems must be capable of accomplishing a wide range of missions. Conventional fixed-wing UAVs have long endurance and range, but require ded- icated infrastructure for takeoff and landing. Fixed-wing VTOL aircraft are a solu- tion to this issue, as they are capable of both hover and forward flight using aerody- namic surfaces. However, transitioning from vertical to horizontal flight for fixed-wing VTOL aircraft is a demanding process. During transition, the propulsion system must provide sufficient thrust to support the weight of the tilting aircraft while also acceler- ating the aircraft to a speed and configuration in which sufficient lift can be provided by the wings. 16
1.2 Motivation Among UAV manufacturers, there is a growing need for aircraft with diverse perfor- mance capabilities that can accomplish a wide range of missions. An example would be a UAV that is required to fly large-payload, high endurance, and short-takeoff mis- sions. Traditional propulsion systems are often ill-suited to meet these requirements due to their fixed, designed-for "worst-case" nature [17]. As a result, many tradi- tional aircraft propulsion systems are oversized for most missions, which translates to a smaller payload and lower energy efficiency. A novel modular hybrid propulsion system (MHPS) is a potential solution to the growing need for flexible aircraft propulsion systems. In an aircraft outfitted with a MHPS, components of the powertrain can be removed and changed between flights to alter propulsion system performance. Modularity provides the capability to tailor the propulsion system to a variety of aircraft missions, enabling increased aircraft performance flexibility. The resulting configurations allow a single airframe to be optimally suited for a variety of missions with different requirements for range, power, and payload. However, the addition of an electrical power source in a hybrid system presents a new challenge: the need for an energy management control policy that determines which energy source is utilized at each point in time during flight. Furthermore, because of the increase in empty weight due to the additional components in a hybrid- electric UAV (e.g. electric motors, batteries, power electronics), it is critical that the propulsion system is optimized for fuel consumption and operational efficiency. A strategy to improve hybrid propulsion system efficiency is through optimization of the power split between the carbon fuel and battery sources, i.e. through the selection of the energy consumption from each available source along the trajectory. This power management can be done in real-time or predefined before a mission, depending on the selected control methodology. When integrated in the aircraft design methodology, the optimal energy management is used in each step of the aircraft sizing loop, minimizing the fuel consumption for the entire mission. 17
Despite the perceived operational advantages, onboard energy management in hybrid aircraft is not yet in widespread use. Most energy management optimization studies involving hybrid aircraft fix the power split between the fuel power and electric power during the optimization run [9]. Notable exceptions use dynamic programming (DP) algorithms to optimize the energy management of an aircraft during flight [4]. However, aircraft models with more states, such as speed or altitude, are difficult to quantify using DP due to computational limitations [9]. In this thesis, a direct method, namely collocation, is used. The use of a direct method like collocation allows for more complex aircraft models, giving new insights on optimal trajectories in addition to optimal energy management. 1.3 Literature Review 1.3.1 Modular Hybrid Propulsion System The modular hybrid propulsion system considered in this thesis refers to a propul- sion system consisting of electrical and carbon fuel subsystems in a parallel hybrid configuration, where modularity refers to the ability to change propulsion system components. The mechanical simplicity of electrical components, especially in the power transfer method (electrical wiring vs. mechanical shafts), enables interchange- ability in hybrid architectures. With modular components, the propulsion system’s performance can be tailored to each mission, maximizing mission-specific performance or payload. This is accomplished by ensuring that the propulsion system is properly sized, such that there is no "dead" mass and ensuring operational requirements are met. Prior research demonstrated that, compared to a hybrid-electric propulsion system with fixed components, a MHPS with 10% of aircraft weight reserved for modular power system components could increase aircraft cruise time by up to 90% and reduce takeoff distance by up to 50%, depending on the installed configuration. With a large range of performance potential, a MHPS has the ability to enable a single airframe to 18
meet a diverse set of mission requirements and accomplish a wide variety of missions. Figure 1-1: A single airframe for a GA aircraft could potentially take on several diverse roles with a MHPS. 1.3.2 Power Management for Hybrid Electric Aircraft The rather low specific energies of current batteries (when compared to carbon fuels), has motivated an increased interest in carbon-fuel electric hybrid propulsion systems. Hybrid propulsion systems allow designers to leverage electric propulsion architecture benefits while maintaining the endurance and range of traditional propulsion systems; hybrid propulsion systems can utilize a central carbon-fuel system to provide the ma- jority of energy required for flight while using the electric system to either supplement or fully-supply the power required to start and maintain flight. This presents a unique power management challenge since hybrid aircraft have multiple energy sources that can compete to meet power and thrust requirements. As a result, there exists a con- tinuous range of carbon fuel and battery power settings to produce the same required power. Choosing when and how much battery power to supplement the carbon fuel engine can influence total mission fuel burn, even when the total battery power used remains the same. Power management of hybrid-electric configurations has been addressed in the au- 19
Figure 1-2: Parallel hybrid drivetrain model. tomobile industry with multiple control schemes, ranging from Stochastic Dynamic Programming to simple hard coded rules. Power management strategies can be classi- fied as either rule-based or optimization-based. Rule-based techniques rely on heuris- tics, intuition and human experience to develop a series of rules for control manage- ment, while optimization-based strategies rely on maximizing/minimizing the value of a certain objectives such fuel consumed or efficiency. [14]. 1.4 Research Objectives The overall research objective is to assess the effect of hybridization on the perfor- mance of a fixed-wing VTOL UAV across multiple phases of flight, and to determine the optimal energy management strategy. An effective strategy to determine the optimal trajectory and energy management for a hybrid aircraft is presented and as- sessed. The present work will also investigate the main factors influencing optimal energy management for a fixed-wing VTOL aircraft. The optimization objective is to minimize the energy or time required to complete phases of flight such as takeoff and landing. In this thesis, the following research questions will be addressed: 1. What are the attributes of optimal flight trajectories for VTOL UAVs (with respect to minimizing energy and time)? 2. What is the optimal energy management strategy for different phases of flight and across an entire mission? 3. What advantages or disadvantages does a hybrid propulsion system offer during 20
demanding phases of flight? 4. What level of performance can be achieved with an optimized hybrid propulsion system relative to traditional propulsion systems? 5. How should the results be cast in an appropriate set of non-dimensional param- eters so that a generic scaling rule can be established? How does the attributes of hybrid-propulsion system scale with flight vehicle characteristics and mission requirements? 1.5 Thesis Scope In this thesis, no attempt will be made in integrating optimal energy management in the design of a hybrid aircraft. Rather, an effective strategy to determine the optimal energy management for a hybrid aircraft is presented and assessed. A collocation approach is used, i.e. a direct optimization method based on an implicit integration technique. The use of a direct method like collocation allows for more complex aircraft models, giving new insights on optimal trajectories in addition to optimal energy management. This work discusses a representative modular hybrid propulsion system intended for use on a fixed-wing VTOL UAV. The flight phases of focus are takeoff, landing, transition, and hover due to their demanding peak power requirements. A simple mis- sion from takeoff to landing is also assessed. To determine the effect of hybridization and other propulsion system design choices on UAV performance, the optimal control framework is used to compute the most time or energy-efficient flight trajectories and power profiles for various permutations of propulsion system components. The re- sults are used to develop guidelines for propulsion system configurations for different missions and to inform the development of onboard energy management strategies. However, no steps are taken to integrate specific energy management policies or con- trol laws into the practical design of an aircraft. To quantify the dependence of VTOL UAV performance on power hybridization 21
and propulsion system design choices, a set of quantitative performance relationships are developed for VTOL-specific phases of flight (vertical takeoff/landing, transition, hover). 1.6 Original Contributions Contributions of this thesis are: 1. Criteria for selecting the extent of electrified propulsion contribution relative to carbon-fuel based propulsion contribution. These criteria include the conditions under which to use carbon-fuel or electrified systems, based on the optimal trajectories and power profiles obtained from the optimization framework. 2. A set of quantitative takeoff, landing, and hover performance relationships for modular hybrid VTOL aircraft. These performance relationships quantify the functional dependence of performance on power hybridization level and choices in aircraft design. Furthermore, the performance relationships enable MHPS sizing and determination of MHPS constituent components. 3. Guidelines to configure modular hybrid propulsion systems for a variety of VTOL UAV missions. A selection guideline for determining the power hy- bridization ratio is proposed. The optimal values of peak power and energy hybridization are provided by a parametric assessment of a set of representative optimized mission phase completion times and energies. Using these guidelines, operators can select propulsion components that enable the modular hybrid air- craft to maximize performance during different phases of flight (takeoff, landing, hover, transition). Additionally, the optimal flight trajectories and MHPS control profiles produced by the optimization framework represent original contributions to this area of re- search. Attributes of optimal flight trajectories for an MHPS-powered VTOL UAV executing takeoff, landing, hover, and a simple complete mission are presented and analyzed. 22
1.7 Thesis Organization This thesis is organized as follows. Chapter 2 outlines the technical approach taken to address the stated research questions. Chapter 3 includes the development of the optimal control framework. Chapter 4 details findings from performance assessments of takeoff, landing, hover, and a simple complete mission. Chapter 5 provides a summary of the primary findings and implications for aircraft propulsion system usage and design. Chapter 6 outlines recommendations for future work. 23
24
Chapter 2 Technical Approach 2.1 Introduction The Modular Hybrid Propulsion system introduces the use of an electrical subsystem (hybridization) to provide propulsion functionalities and the ability to swap power production and energy storage components (electrical or carbon fuel) to tailor the propulsion system to different kinds of missions (modularity). To address the research questions posed in Chapter 1, a representative UAV is chosen for analysis using a mission assessment optimization framework. This section details the optimization framework used to analyze hybrid UAV performance and the simplified models used to simulate different phases of flight (takeoff, landing, hover, etc.) for the hybrid UAV of interest. The term simplified models refers to the computationally inexpensive first-principles based low-order models that illustrate key trends. 2.2 Aircraft model A fixed-wing VTOL UAV platform is utilized to evaluate MHPS performance against traditional propulsion system performance since these aircraft typically have high performance flexibility requirements. The airframe has a maximum takeoff mass of 50 kilograms. The total mass consists of 8 kg of total energy storage, in the form of carbon fuels or batteries; up to 9 kg for power production (i.e. internal combustion 25
engine and electric motor), 16 kg airframe components and avionics, and an 17 kg payload. The MHPS is described in further detail in Section 2.3. Airframe and payload masses represent similar mass fractions as compared to other small- and medium-sized UAVs [17]. Thrust is provided by a single propeller, mounted in a pusher configuration at the rear of the aircraft. Pusher-prop UAV designs are commonly seen in large-sized UAVs such as the General Atomics MQ-1, or similar medium sized UAVs like the NextTech Atlas-V or the Brumby Mark III. The representative UAV is tail-sitter, a type of VTOL aircraft that takes off and lands on its tail, then tilts horizontally for forward flight. Conventional fixed-wing UAVs have long endurance and range, but require dedicated infrastructure for takeoff and landing. Fixed-wing VTOL aircraft, such as tail-sitters, are a solution to this issue, as they are capable of both hover and forward flight using aerodynamic surfaces. However, transitioning from vertical to horizontal flight for fixed-wing VTOL aircraft is a demanding process. During transition, the propulsion system must provide sufficient thrust to support the weight of the tilting aircraft while also accelerating the aircraft to a speed and configuration in which sufficient lift can be provided by the wings. The airfoil employed is a NACA 4418, providing high lift and stable stall charac- teristics [11]. This airfoil has undergone testing at extreme angles of attack, so the representative aircraft and mission framework would meet the requirements of both conventional and VTOL aircraft operation. The wings have a relatively-large wetted area (3 2 ) to keep wing loading low and are comparable to other endurance aircraft, such as small UAVs and gliders. The aircraft model module employed is entirely generic - aircraft attributes such as airfoil type, carbon fuel/battery mass fractions can be altered by substituting values in the aircraft model component of the mission assessment framework. 26
2.3 Modular Hybrid Propulsion System The representative MHPS considered in this thesis is a parallel hybrid system where the carbon fuel engine is also connected to the propeller, unlike a serial hybrid. With this additional connection, propulsive power can be provided by both the electric motor and carbon fuel engine. The representative MHPS includes three groups of components: 1. Energy Storage System which includes two sources of energy, a fuel tank for carbon fuel energy and a battery stack for electrical energy 2. Power Production mass which includes mass from an electric motor and an internal combustion engine 3. Thrust Production components include the mass of the propeller and asso- ciated machinery The MHPS converts energy into thrust through two primary paths. In the carbon fuel path, gasoline is burned in the internal combustion engine, converting chemical energy into mechanical energy and power which is transferred through a shaft and gearbox to the propeller where thrust is produced. In the second path, electricity is discharged from the batteries to power an electric motor, which then provides shaft power to drive the propeller and produce thrust. Since the electric motor and ICE are connected to the propeller in a parallel configuration, both sources can deliver power to the propeller simultaneously. The modularity of the MHPS introduces the ability to swap propulsion system components in between flights. Thus, the effects of hybridization can be assessed by changing propulsion system component attributes such as electric motor size or battery capacity. Optimizations and analyses can then be conducted to assess the impact of hybridization and to determine the optimal propulsion system configuration for each type of mission. In this thesis, the energy storage system components (fuel tank and battery size) and power production components (ICE and electric motor) are considered modular. Optimizations are carried out for various MHPS configurations 27
Figure 2-1: MHPS Architecture and component groups. to determine the advantages or disadvantages that hybridization offers for different VTOL UAV missions. Specifically, the propulsion system design choices utilized are: • Electric motor peak power, • Carbon fuel engine peak power, • Electric energy hybridization factor, = + (where is total energy stored in batteries and is total energy stored in carbon fuel) • Electric power hybridization factor, = + Two powerplants serve as reference power production components. The reference carbon-fuel engine is based on the Suter Industries TOA 288, a 9.2 kg two-cylinder ICE. The reference electric motor is based on the MGM-Compro REX30 motor, a 5.2 kg electric propulsion system (including motor and motor controller). The peak power output from both systems is 18 kW, in line with UAVs of similar size and requirements. Power hybridization factor and carbon fuel/electric motor peak power is varied to determine the effect of changing power production components. Variation of the power hybridization factor translates to a change in the size of the power produc- tion components. As increases, the size and power output of the electric motor 28
increases. If total power is held constant, the size and power output the ICE must also decrease. The Energy Storage System components are varied through the Energy Hybridiza- tion Mass Ratio, , a different form of electric energy hybridization factor. The En- ergy Hybridization Mass Ratio is defined in Equation 2.1, where is the battery mass, is the energy storage system (ESS) mass, and is carbon fuel mass. = = (2.1) + As increases from 0 to 1, the portion of total energy stored in the batteries increases. As an effect of their lower energy density, the total energy stored in the ESS decreases as increases. The strategy of varying component mass while maintaining the total ESS mass highlights the specific impact of battery and carbon fuel energy densities on the aircraft capability and performance. Analysis of is primarily used in this thesis to analyze the effects of electrification on longer mission segments like cruise range. For short, demanding mission segments, like takeoff or landing, the has a smaller impact than , since range or mass changes are not of concern when analyzing independent takeoff or landing performance. 2.4 Hybrid Propulsion System Performance Hybrid propulsion system performance is analyzed and quantified for takeoff, landing, and hover mission segments. Focus is placed upon establishing the functional depen- dence of hybrid component technological parameters and design choices on aircraft performance. The primary technological parameters that affect hybrid propulsion system per- formance are: • Electric motor specific power, = • Carbon fuel engine specific power, = • Electric motor efficiency, 29
• Carbon fuel engine efficiency, • Battery specific energy, • Carbon fuel specific energy, In addition to new design challenges, the MHPS introduces operational challenges due to the presence of the electrical subsystem. The first challenge is efficient opera- tion of the propulsion system over the course of a mission. To efficiently accomplish mission objectives, battery and carbon fuel energy sources must be properly managed. With an appropriate energy management policy, carbon fuel and battery energy can be utilized in a manner that satisfies optimization objectives, such as minimum en- ergy consumed or minimum time to complete a mission phase, while meeting mission operational requirements. The energy management policy referred to here determines the power output and operation point of each EM, generator and carbon-fuel engine. The chosen operating points in turn determine the power drawn from the battery and carbon-fuel stores at each point of time during a mission. This thesis formulates and develops an effective framework for determining an optimal energy management policy for energy-efficient and time-efficient trajectories. 2.5 VTOL Specific Phases of Flight As noted in Chapter 1, UAV airframes must also be capable of accomplishing a wide range of missions. Typical UAV missions consist of a variety of phases, including take- off, climb, cruise, loiter, dash, etc. Conventional fixed-wing UAVs have long endurance and range, but require dedicated infrastructure for takeoff and landing. Fixed-wing VTOL aircraft are a solution to this issue, as they are capable of both hover and forward flight using aerodynamic surfaces. However, transitioning from vertical to horizontal flight for fixed-wing VTOL aircraft is a demanding process. During tran- sition, the propulsion system must provide sufficient thrust to support the weight of the tilting aircraft while also accelerating the aircraft to a speed and configuration 30
in which sufficient lift can be provided by the wings. Thus, this transition is an im- portant consideration for the design of these types of aircraft. Out of the different phases of flight for a VTOL UAV mission, the takeoff, landing, transition and hover phases are singled out for investigation in this thesis due to their demanding power requirements. Takeoff for a fixed-wing VTOL aircraft begins with a vertical climb from the ground, followed by a transition from vertical to horizontal flight. During this ma- neuver, the aircraft and propulsion system must be operated efficiently while meeting takeoff requirements. To minimize energy consumed, the aircraft must minimize time spent where the propulsion system provides the entirety of the lift. However, if the aircraft completes the takeoff maneuver too fast, it risks consuming excessive energy. Therefore, there exists an optimal takeoff trajectory and energy management strat- egy. During a tail-sitter UAV landing, the UAV executes a pitch up maneuver to transition from horizontal flight to vertical flight, followed by a controlled vertical descent. Although the maneuver is less demanding than takeoff, since lift is already being generated by the wings, efficiency gains can be made by determining the op- timal parameters (i.e. velocity, flight path angle, angle of attack, etc.) to begin the pitch up maneuver, or the flight path itself. During transition from vertical to hori- zontal flight, kinetic energy is traded for potential energy as the aircraft loses velocity during the climb upwards. During the hover and vertical descent, the only source of lift is the propulsion system; as a result, an energy-efficient power management strategy is essential. Hover is another demanding VTOL-unique mission phase. During hover, the tail- sitter is oriented vertically with zero velocity, with the propulsion system providing a thrust force equal to the weight of the aircraft. While the mission assessment framework is used to determine the operation of the UAV, such as optimal takeoff/landing trajectories and energy management strat- egy, the results produced can also be used to inform design decisions about MHPS configurations. Propulsion characteristics, such as hybridization level or component efficiencies, can drastically impact UAV performance. For example, during missions 31
like cargo delivery with multiple takeoffs and landings; the MHPS can be configured with power production and energy storage system components beneficial for vertical flight. Figure 2-2: Vertical landing of tail-sitter unmanned aerial vehicle. 2.6 Summary In summary, a representative UAV is selected and defined as a research platform for assessing the impact of hybridity and modularity on aircraft performance. The assessment consists of first defining the propulsion system architecture followed by se- lecting the specific components and properties that will vary with system modularity. A mission framework is formulated and defined using three open-source Python pack- ages (Dymos, OpenMDAO, and IPOPT) to determine the aircraft dynamics while the UAV completes the phases of flight. VTOL-unique phases of flight are defined for as- sessment, and optimization objectives are identified for these mission segments. The formulation of the optimization framework is outlined in the following chapter. 32
Chapter 3 Mission Assessment Framework 3.1 Introduction A mission assessment and optimization framework is developed for the representative tail-sitter UAV described in Chapter 2. The framework is used to determine the tra- jectory and power schedule for a specified phase or phases of flight for an optimization objective. The optimization objective for each assessment is either minimum energy consumed, or minimum time required for completion of the selected flight mission and or phase. The formulation of the mission assessment framework is outlined in this chapter. D. Yang recommended dynamic programming to seek the optimal power man- agement of an MHPS. However, dynamic programming has significant practical lim- itations, which stem from the exponentially-increasing dimensionality of the opti- mization problem that results when assessing complex systems. In practice, dynamic programming can only be used for problems with either a small number of state vari- ables to optimize, or a small number of timesteps. As a result, aircraft models with more states, such as speed or altitude, are difficult to quantify using DP [17]. Therefore the above noted computational limitations have motivated the selec- tion of the Python package Dymos as the framework to determine the optimal power management and flight trajectory for the MHPS-equipped tailsitter UAV. Dymos is a library for optimizing control schedules for dynamic systems – sometimes referred 33
to as optimal control or trajectory optimization. Dymos is focused on direct opti- mization methods based on an implicit integration technique, collocation. The use of a direct method such as collocation allows for more complex aircraft models, giving new insights on optimal trajectories in addition to optimal energy management [9]. 3.2 Dymos and OpenMDAO Software Dymos, a library for the optimal control of dynamic multidisciplinary systems, en- ables optimization of tightly connected subsystem designs as well as the operation of the overall system. In this case, the term multidisciplinary refers to more gen- eral optimization problems where dynamics are only one part in a larger system-level model with additional – potentially computationally expensive – calculations that come before and after the dynamic calculations. While Dymos can optimize standard optimal control problems, it can also optimize systems in which a trajectory is just one part of the overall optimization. Many optimization packages rely on the param- eterization of hardware models, for example, an approximation of an engine’s mass as a function of its thrust level. Rather, Dymos allows users to impose higher-fidelity design considerations and apply the resulting subsystem designs to the trajectory profile [5]. Dymos is built upon the OpenMDAO framework, which enables highly effective/efficient computation of accurate derivatives. The OpenMDAO framework has a modular derivative system, which allows users to select from finite differencing, complex step, hand differentiated, and algorithmic differentiation. 3.3 Dymos Phases and Trajectories A trajectory or flight path is the path that an object with mass in motion follows through space as a function of time. Dymos breaks the trajectory into portions of time called phases. Most real-world use cases of optimal control involve complex tra- jectories that cannot be modeled with a single phase. For example, a trajectory may consist of multiple phases that may have different equations of motion, different path 34
constraints or, different control parameterizations. Dymos uses the concept of phases to support intermediate boundary constraints and path constraints on variables in the system. Each phase represents the trajectory of a dynamical system, and may be subject to different equations of motion, force models, and constraints. Multiple phases may be assembled to form one or more trajectories by enforcing compatibility constraints between them. The procedure for subdividing a single trajectory into multiple phases provides several capabilities. First, intermediate constraints along a trajectory can be enforced by applying a boundary constraint to a phase that begins or ends at the time of interest. For example, during takeoff, a tail-sitter UAV may be required to vertically climb to a certain altitude before it can pitch over and transition to horizontal flight. Additionally, path constraints can be applied to within each phase to bound some performance parameter within that phase. For instance, the tail-sitter UAV may need to adjust its trajectory to avoid stall during cruise. For implicit and explicit phases, the equations-of-motion or process equations are defined via an ordinary differential equation where x is the vector of state variables (the variable being integrated), t is time (or time-like), u is the vector of parameters (an input to the ODE), and f is the ODE function. = ( , , ) (3.1) Each phase within a trajectory can use its own separate set of ordinary differential equations (ODE). For example, an aircraft with vertical takeoff and landing capability, such as the representative tail-sitter UAV, may use different ODEs for vertical flight and horizontal flight. ODEs are implemented as standard OpenMDAO models which are passed to phases at instantiation time with some additional annotations to identify the states, state-rates, and control inputs. Each phase in the trajectory uses its own specific time discretization tailored to the dynamics present in that portion the trajectory. As a result, the time evolution of the trajectory can be split into multiple phases with separate time discretizations. 35
If one part of a trajectory has fast dynamics and another has slow dynamics, the time evolution can be broken into two phases with separate time discretizations. Mem- bers of the optimal-control community use many different techniques to discretize the continuous optimal control problem into a form that can be solved by nonlin- ear optimization algorithims. Each discretization technique is called a transcription. Two different collocation transcriptions are supported by Dymos: high-order Gauss- Lobatto and Radau. Both transcription methods represent state and control variable trajectories as piecewise of at least third order. They are formulated in such a manner that enables efficient computation of the required quantities to perform integration in a numerically rigorous manner. 3.4 Optimization Algorithm Since Dymos is not distributed with an optimizer, it relies on optimizers that are available in the OpenMDAO installation. OpenMDAO contains an interface to the optimizers in SciPy, and an additional wrapper for the pyoptsparse library which has more powerful optimizer options such as SNOPT, and IPOPT. Through OpenM- DAO, users are allowed to integrate their own optimizer of choice, which Dymos can then use without any additional modifications. However, higher-quality optimizers are important for getting good performance, especially on more challenging optimal- control problems. Dymos is primarily designed to work primarily with gradient-based algorithms. In general, optimal-control and co-design problems will have both a very large number of design variables and a very large number of constraints. Both issues make gradient-based methods the strongly preferred choice [5]. The Interior-Point OPTimizer (IPOPT) package was chosen as the optimizer for the mission assessment framework. IPOPT is an interior point method implemen- tation with a filter line-search algorithm that is designed specifically for large-scale nonlinear programming. The combination of Dymos, OpenMDAO, and IPOPT is used to organize the trajectory and ODEs, determine the system derivatives, and seek the optimal solution. 36
3.5 Optimal Control Optimal control deals with finding a control for a dynamical system over a length of time such that an objective function is optimized; in other words, optimal control implies the optimization of a dynamical system. Usually, the optimization comes in the form of a trajectory in which system states evolve over time. A system state variable is one of the set of variables that are used to describe the mathematical "state" of a dynamical system. In a mechanical system, such as an aircraft in flight, the position coordinates and velocities are typical state variables. The evolution of these states is governed by an ordinary differential equation (ODE). In Dymos, all dynamics are characterized as an ODE. When using optimal control software, the dynamics of the system are usually defined as a set of ODEs that utilize explicit functions to compute the rates of state variables to be time integrated. 3.5.1 Defining ODEs In optimal control problems, ordinary differential equations (ODE) or differential algebraic equations (DAE) dictate the evolution of the state variables of the system. Typically, the evolution of the system state variables occurs in time, and the ODE represents the system’s equations of motion (EOM). However, the equations of motion are not limited to mechanical systems; they can define a variety of different systems. Equations of motion are commonly referred to as process equations in other fields. Dymos uses a standard OpenMDAO System to represent equations of motion. The OpenMDAO system takes a set of variables as input, and computes outputs that include time-derivatives of the state variables. Finally, the system dynamics may be subject to some set of controllable parame- ters. In Dymos these are categorized into the dynamic controls and the static param- eters, which are covered in the next section. Dymos also needs to know how state, time, and control variables are to be connected to the System and needs to know which outputs to use as state time-derivatives. 37
3.5.2 Controls and Parameters Control variables are used to impact the behavior of the system. Controls may be allowed to vary with time, such as the power provided by an electric motor or the angle-of-attack of an aircraft during flight. These variables are referred to as dy- namic controls. Other controllable parameters might be fixed with time, such as the wingspan or airfoil shape of an aircraft. These variables are referred to as parame- ters, although in the literature they may also be referred to as static controls. The endpoints in time, state values, control values, and design parameter values define the independent variables for the optimization problem. In Dymos, these variables are discretized in time to convert a continuous-time optimal control problem into a nonlinear programming problem. 3.5.3 Constraints When optimizing problems, constraints on the system are always present. Some constraints can be imposed as bounds on the independent variables. For example, the initial conditions of a trajectory can be fixed by bounding the initial states and time to the desired value. Constraints on a variable placed at the start or end of a phase are called bound- ary constraints. There are a few ways to impose boundary constraints in a Dymos optimization problem, each with slightly different behavior. One way to constrain fixed values is to remove them from the optimization problem altogether. This can be done for time, state, and control variables. Although removing constrained values from the optimization problem simplifies computation, the optimizer lacks freedom to move these values around, which can lead to failure modes that are not obvious. The second class of constraints supported by Dymos are path constraints, so called because they are imposed throughout the entire phase. Like boundary constraints, path constraints can be placed upon design variables by using simple bounds. 38
3.5.4 Objective Function Dymos may be used to both simulate and optimize dynamical systems. The phase construct is generally used in optimization contexts. Within each phase, the user can set the objective: = (¯ ¯ , , ¯, ) (3.2) The objective may be any output within the phase, as with constraints. Phases can also be incorporated into larger models wherein the objective is defined in some subsystem outside of the phase [5]. 3.6 Mission Assessment Framework The mission assessment framework models the dynamics of the representative UAV aircraft in flight at each time step in the simulated mission. These physics-based cal- culations are broadly grouped into three categories: aerodynamics, propulsion, and flight dynamics. Aerodynamic forces are modeled based on the aircraft state, includ- ing velocity, mass, altitude, flight path angle, and angle of attack. Power consumption and thrust production are calculated based on velocity, ICE power setting, and EM power setting. These forces acting on the aircraft are then balanced to calculate the resulting aircraft flight dynamics (acceleration and pitch rate). The UAV operation is affected by three control variables (angle of attack, ICE power setting, and EM power setting), which correspond to typical pilot controls so as to realistically model ability to control the aircraft. Each state variable has a rate source. A state variable is one of the set of variables that are used to describe the mathematical "state" of a dynamical system. Intuitively, the state of a system describes enough about the system to determine its future behaviour in the absence of any external forces affecting the system. The extended design structure matrix (XDSM) [8] of the trajectory model is shown in Figure 3-1. The equations of motion governing each module of the XDSM are outlined in the following sections. Analytical partial derivatives of the trajectory 39
Table 3.1: Mission Assessment Framework and State Variables Type Variable Unit Electrical energy consumed J Carbon fuel energy consumed J Distance travelled m State Variables Altitude m Velocity m/s Flight path angle deg Aircraft mass kg Angle of attack deg Control Variables Carbon fuel engine power W Electric motor power W Table 3.2: Equation of Motion State Variables and Rate Sources State Variable Rate Source Electrical energy consumed EM power Carbon fuel energy consumed ICE power Distance travelled Horizontal velocity ˙ Altitude Vertical velocity ˙ Velocity Acceleration ˙ Flight path angle Pitch rate ˙ Aircraft mass Fuel burn rate ˙ equations of motion are implemented explicitly in the trajectory model to support gradient-based optimization. The trajectory model for the phases of flight is developed using the NASA Dymos package [5] within the NASA OpenMDAO library [6]. Each phase of the trajectory is discretized using a Gauss-Lobatto pseudo-spectral transcription method using 15 segments per phase and a third order transcription per segment [7]. The following subsections provide an overview of the mission assessment framework components and equations of motion. 3.6.1 Flight Dynamics To determine the trajectory of the aircraft, we solve for the aircraft’s position, velocity, and flight path angle as functions of time, given the control variables. A free body diagram of the forces acting on the VTOL UAV during the cruise is shown in Figure 40
Figure 3-1: Extended design structure matrix of the trajectory model to design the energy management system of the hybrid UAV. 3-2. The equations of motion are expressed as follows: In equations 3.3-3.6, the aircraft mass, flight path angle, and angle of attack are given by , , and , respectively. = cos − − sin (3.3) cos = sin + − (3.4) = cos (3.5) = sin (3.6) 3.6.2 Aerodynamics The lift and drag forces on the aircraft are computed using: 1 = 2 (3.7) 2 41
Figure 3-2: Free Body Diagram (FBD) of the VTOL UAV during the cruise phase. 1 = 2 (3.8) 2 For this study, the aerodynamic force coefficients, and , are evaluated as functions of from public wind tunnel data for the NACA 4418 airfoil. Smooth fits of lift and drag coefficient data were produced through cubic spline interpolation, with continuity of derivatives between segments. In the case study presented here, the wing surface area is equal to 3.0 2 , a representative wing surface area for comparable medium-sized UAVs. 3.6.3 Atmosphere The 1976 US Standard Atmospheric (USSA) model [15] is used, given by Equations 3.9-3.12. The model computes the ambient temperature, 0 , pressure, 0 , density, 0 , and speed of sound, 0 at altitude, , given the sea level conditions (referenced by subscript sl). In Equations 3.9-3.12, the ratio of specific heats, the gravitational constant, the air gas constant and the atmospheric temperature lapse rate are given by , , , and , respectively. 0 = − (3.9) 42
(︂ )︂ 0 0 = (3.10) 0 0 = (3.11) 0 (3.12) √︀ 0 = 0 3.6.4 Propulsion The net thrust from the propeller is computed as a function of power using Equation 3.13, based on disk actuator theory [3]. (︃ √︃ )︃ ∞ ∞2 = = ∞ + + + (3.13) 2 4 2 0 In Equation 3.13, is the power supplied to the propeller disk and is the thrust, is the disk area, and is a correction factor to account for induced-power losses related to nonuniform inflow, tip effects, and other simplifications made in momentum theory [3]. In this paper, = 1 for ideal power, and = 0.125 2 . Finally, ∞ is the component of freestream velocity normal to the propeller disk, i.e. ∞ = cos . Power is a control variable in the optimization problem, and we use the Newton-Raphson method to solve this non-linear equation for thrust with power as an input [3]. 3.6.5 Power Management The available power to the propulsor is computed using the following: = · + · (3.14) Carbon fuel engine efficiency is equal to 0.3, and electric motor efficiency is equal to 0.9. These values are estimates from representative electric motors 43
You can also read